Converting a sturdy children’s pedal go-kart (Kettcar) into a 3000 W fully electric vehicle - faster, easier, and more fun than pedaling.
Originally pedal-powered, the Kettcar is now fully electric and capable of pulling trailers or driving around the yard with minimal effort.
Motivation
The original Kettcar was extremely sturdy but heavy, with only 3 gears and a poor brake system. Pedaling required significant effort, making it impractical for children and resulting in years of disuse.
Given its strong steel frame, it was an ideal base for conversion into a usable and enjoyable electric vehicle.
 Original pedal-powered Kettcar
Original pedal-powered Kettcar
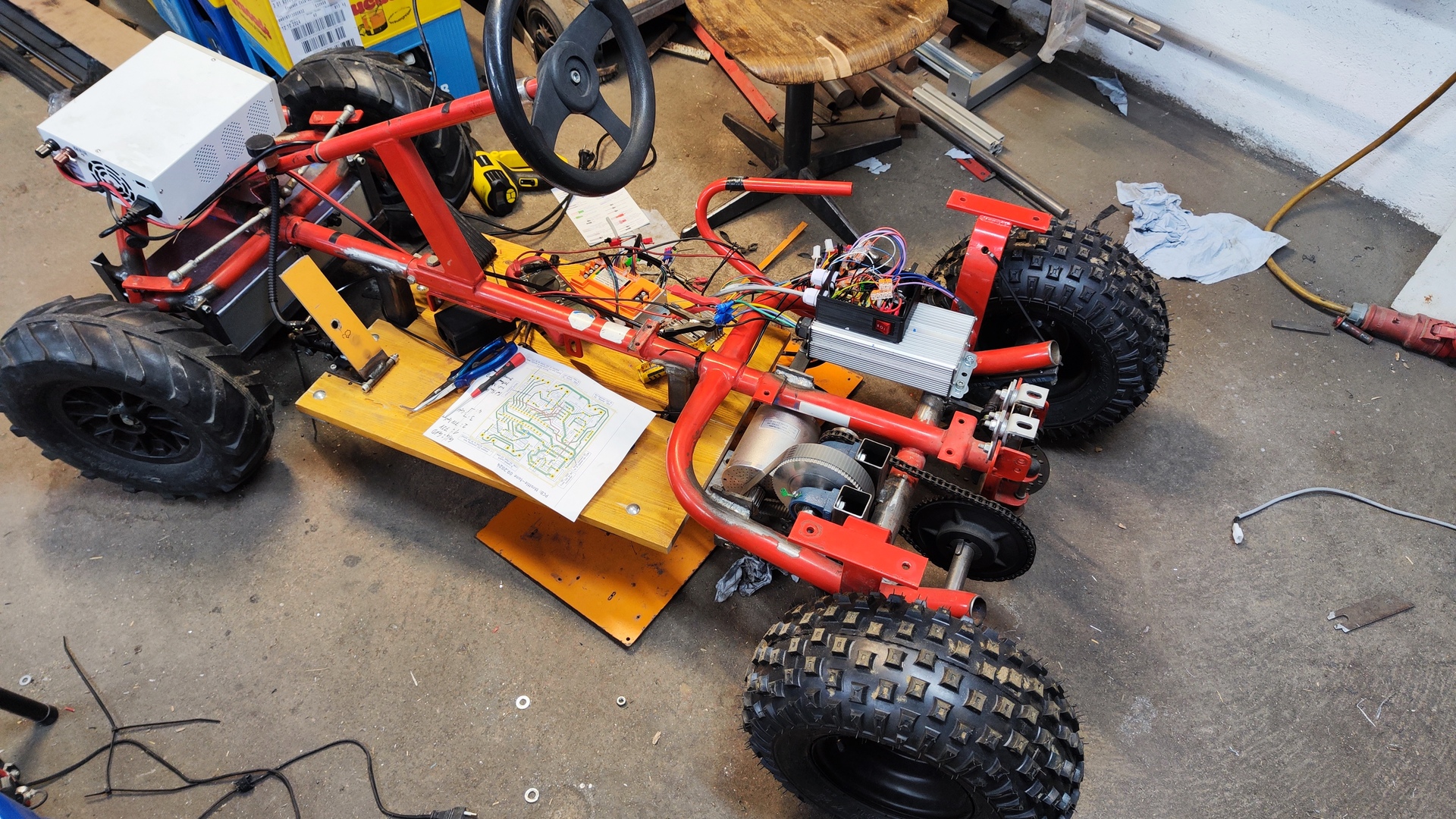
 Converted electric Kettcar
Converted electric Kettcar
Specification
- Top speed: 30 km/h
- Range: ~2 h (estimate, untested)
-
Features:
- 3 programmable speed levels + hidden sport mode
- LED headlight
- Chain and belt guards
- Adjustable seat
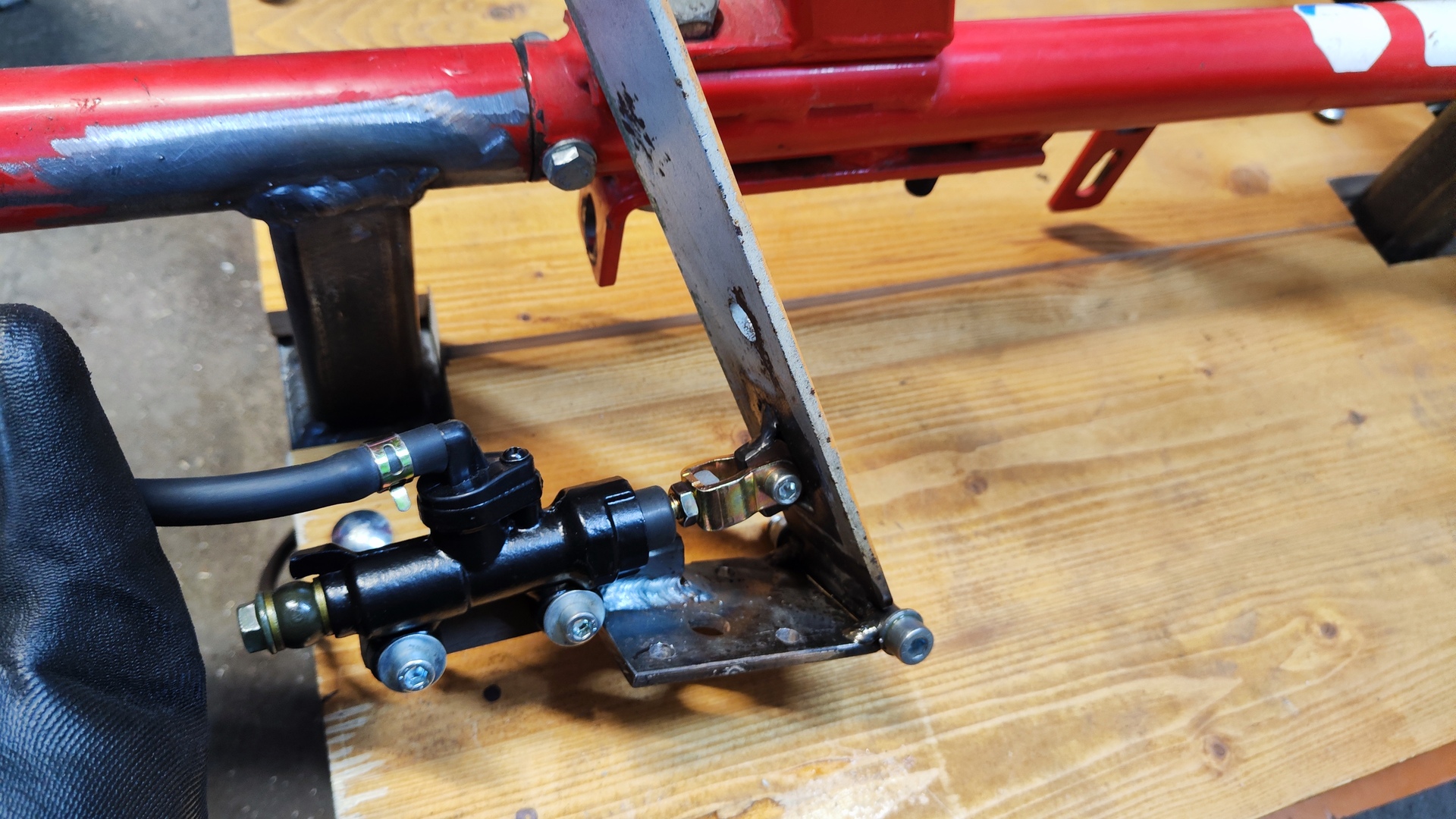
- Hydraulic brake
- Planned: Bicycle trailer hitch, tire guards, paint job
 Rear view after installing the chain guard
Rear view after installing the chain guard
Components
Mechanical
- Frame: Original Dino Cars Kettcar steel frame
-
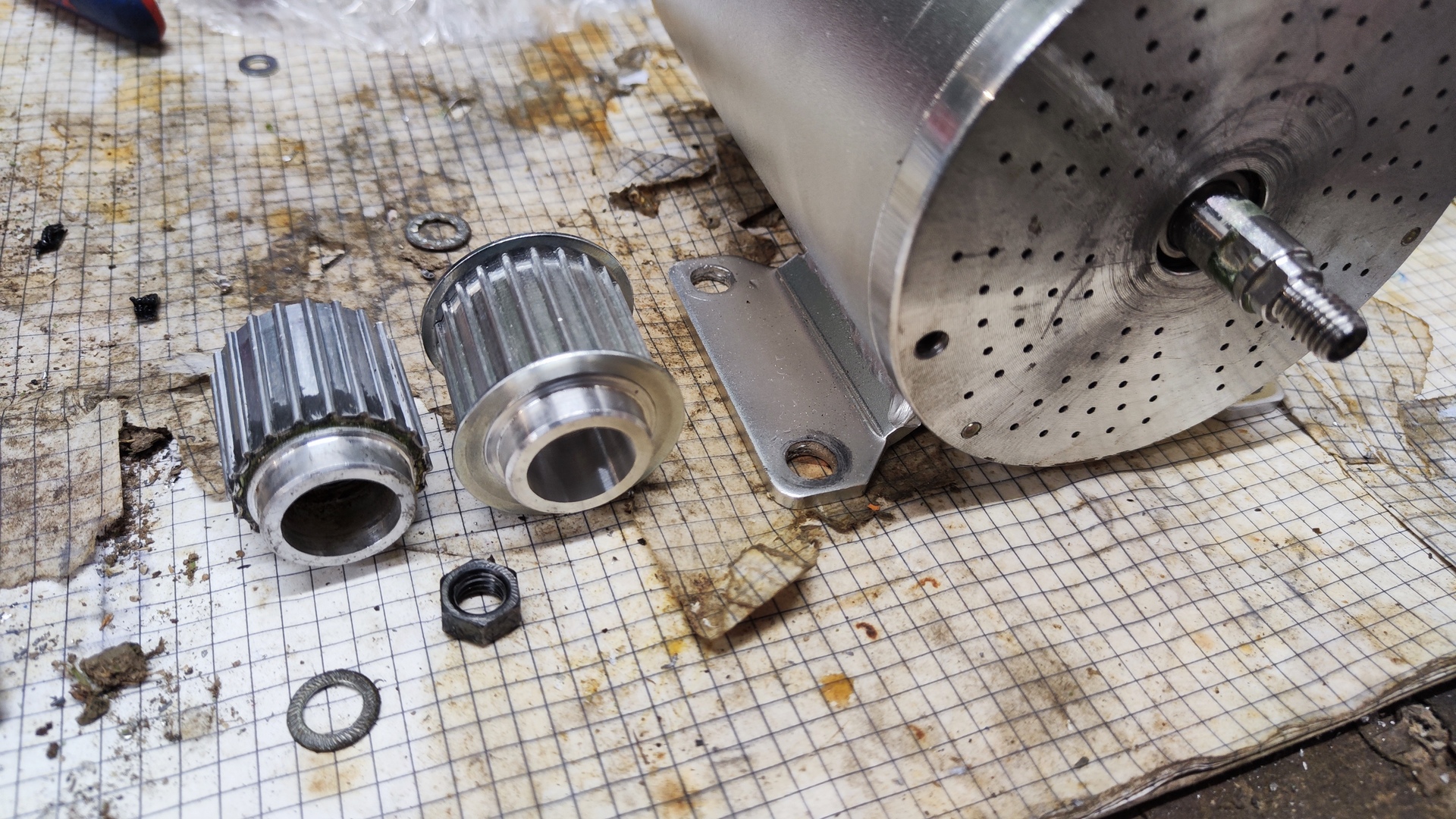
Drivetrain:
- 20 mm intermediate shaft for high gear reduction because of high-RPM motor in combination with large tires
- Stage 1 - belt drive:
- Motor pulley: AT5 Z22
- Shaft pulley: AT5 Z64
- Belt: AT5 B25 500 mm (Z100)
- Stage 2 - chain drive:
- Shaft sprocket: Z14
- Axle sprocket: Z57
- Chain: 06B-1 (3/8″ × 7/32″)
- 25 mm rear axle
- 2x bearing block
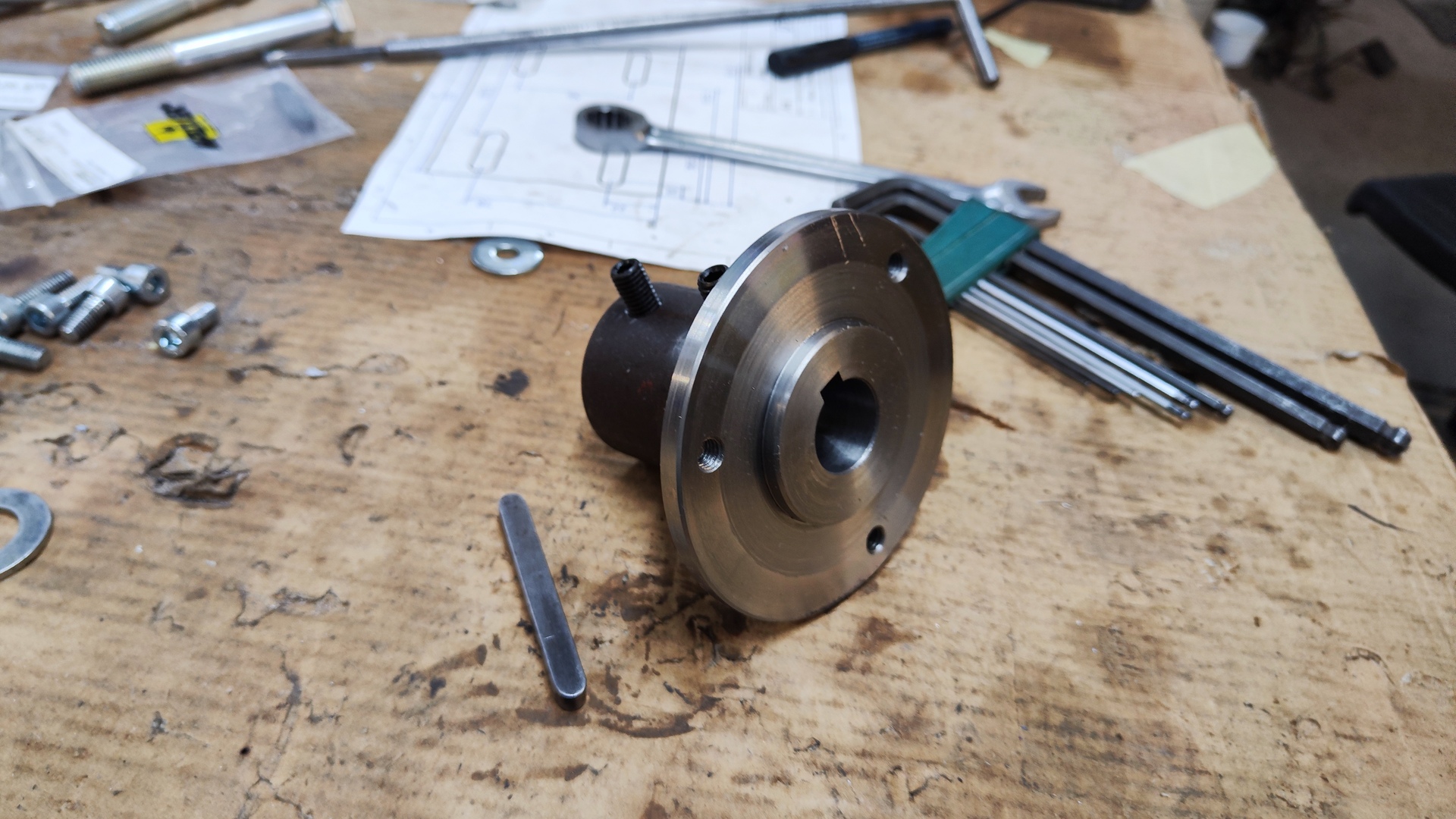
- Custom wheel hub fixed (key)
- Custom wheel hub free spinning (2x bearing)
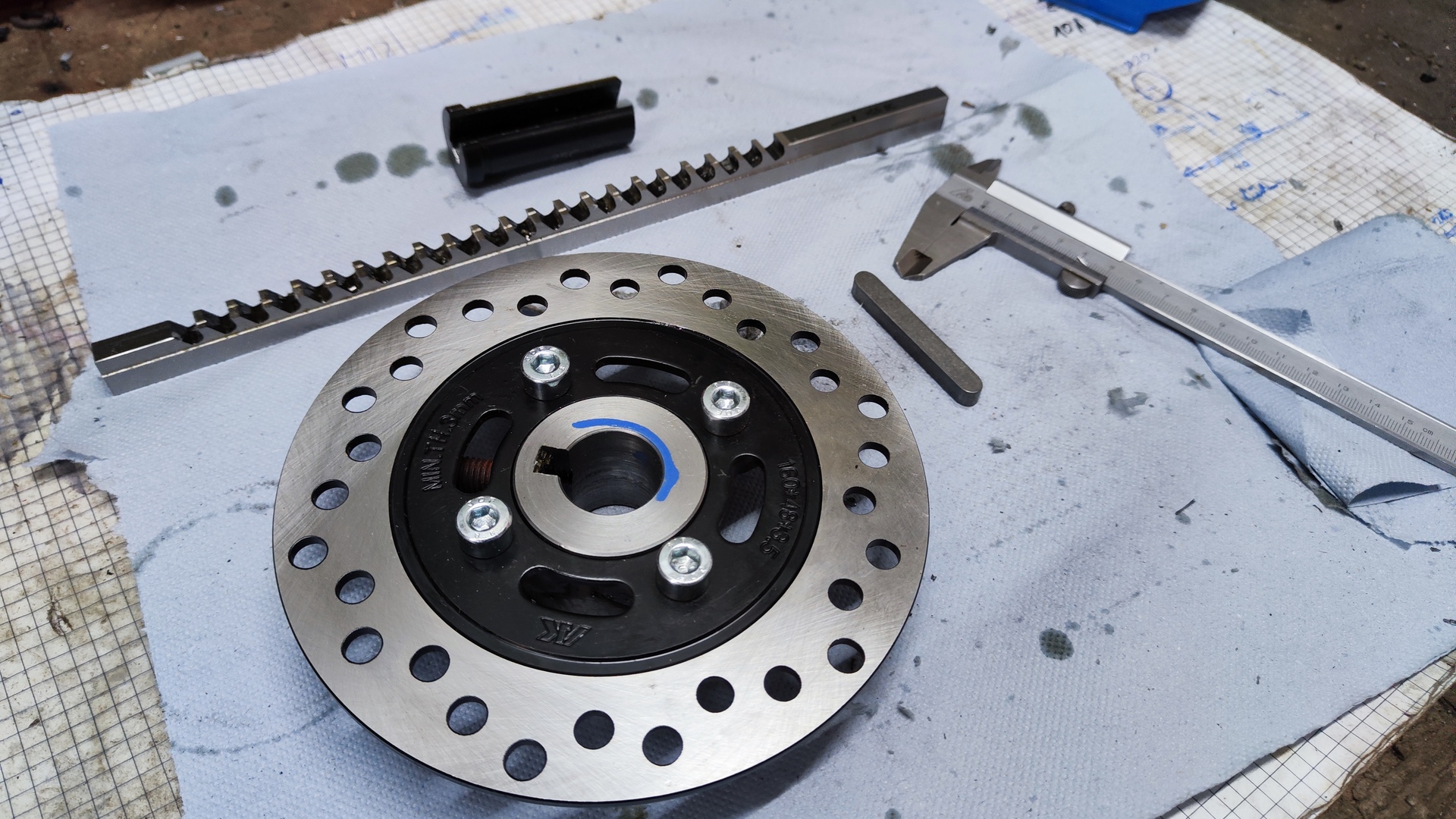
- Custom brake disk adapter
-
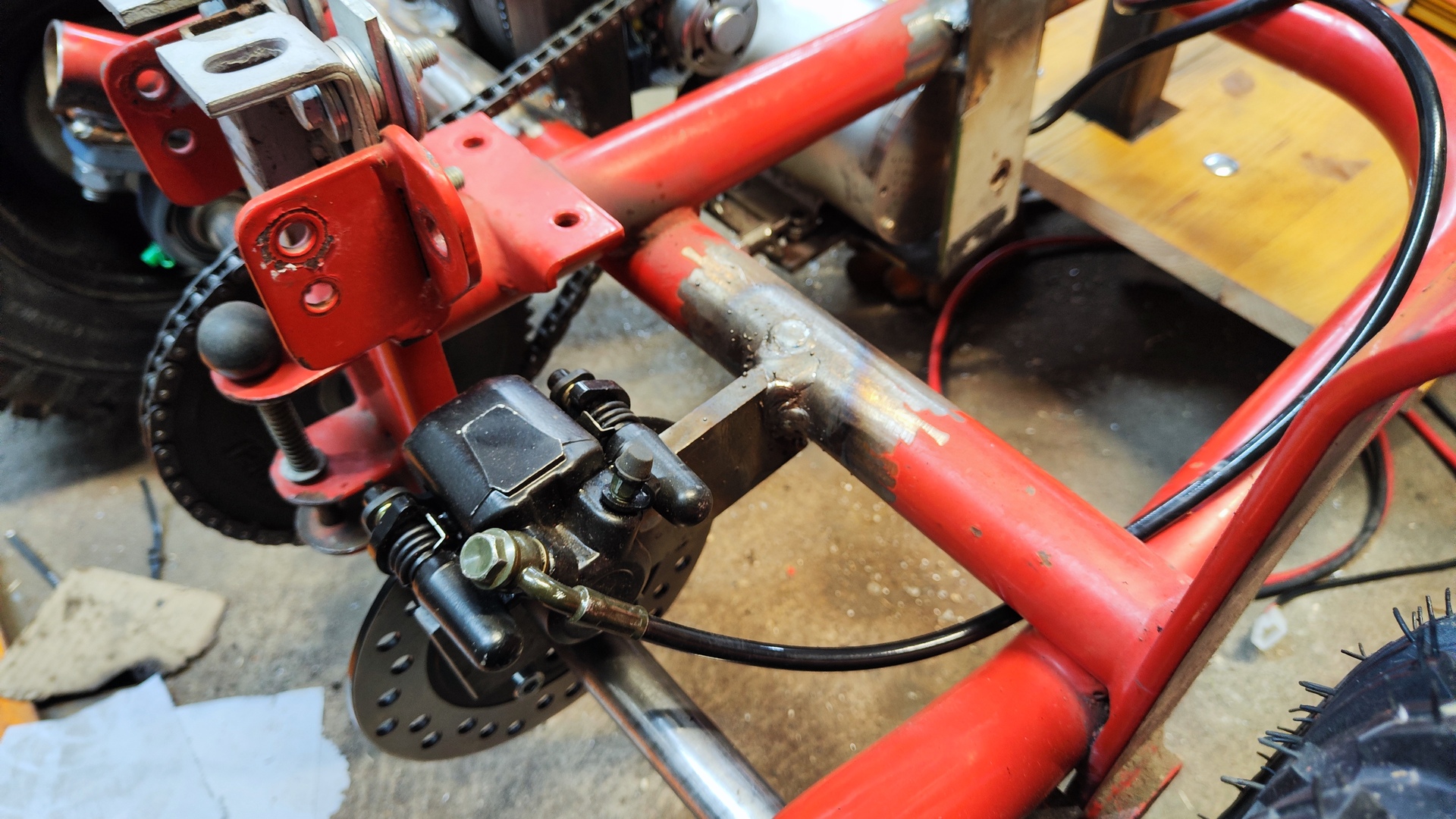
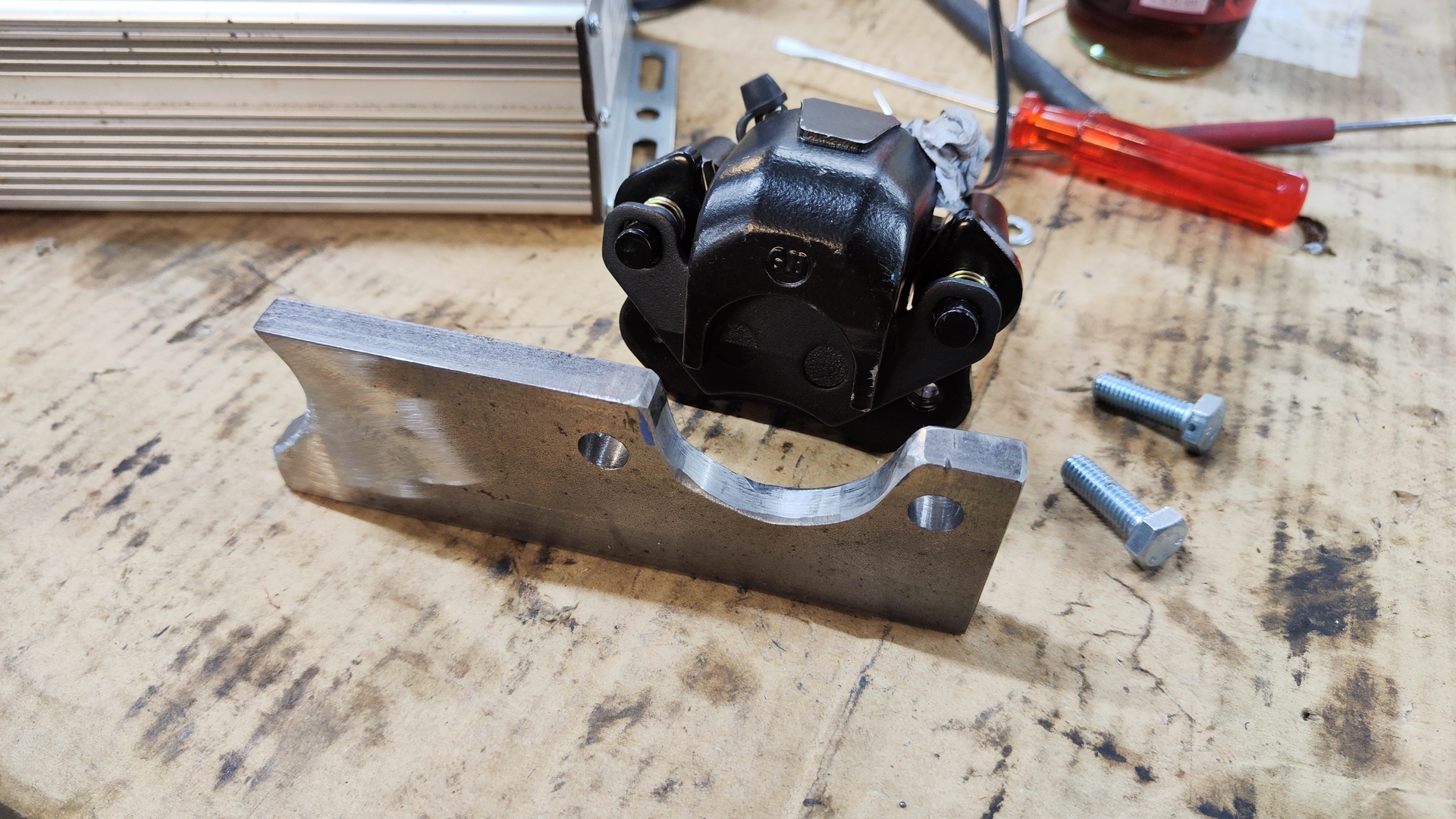
Brake:
- Single hydraulic disc brake (rear axle, go-kart kit)
-
Tires:
- Rear: ATV complete wheels 16×8-7 “knobby”, 3-hole
- Front: Original Kettcar wheels
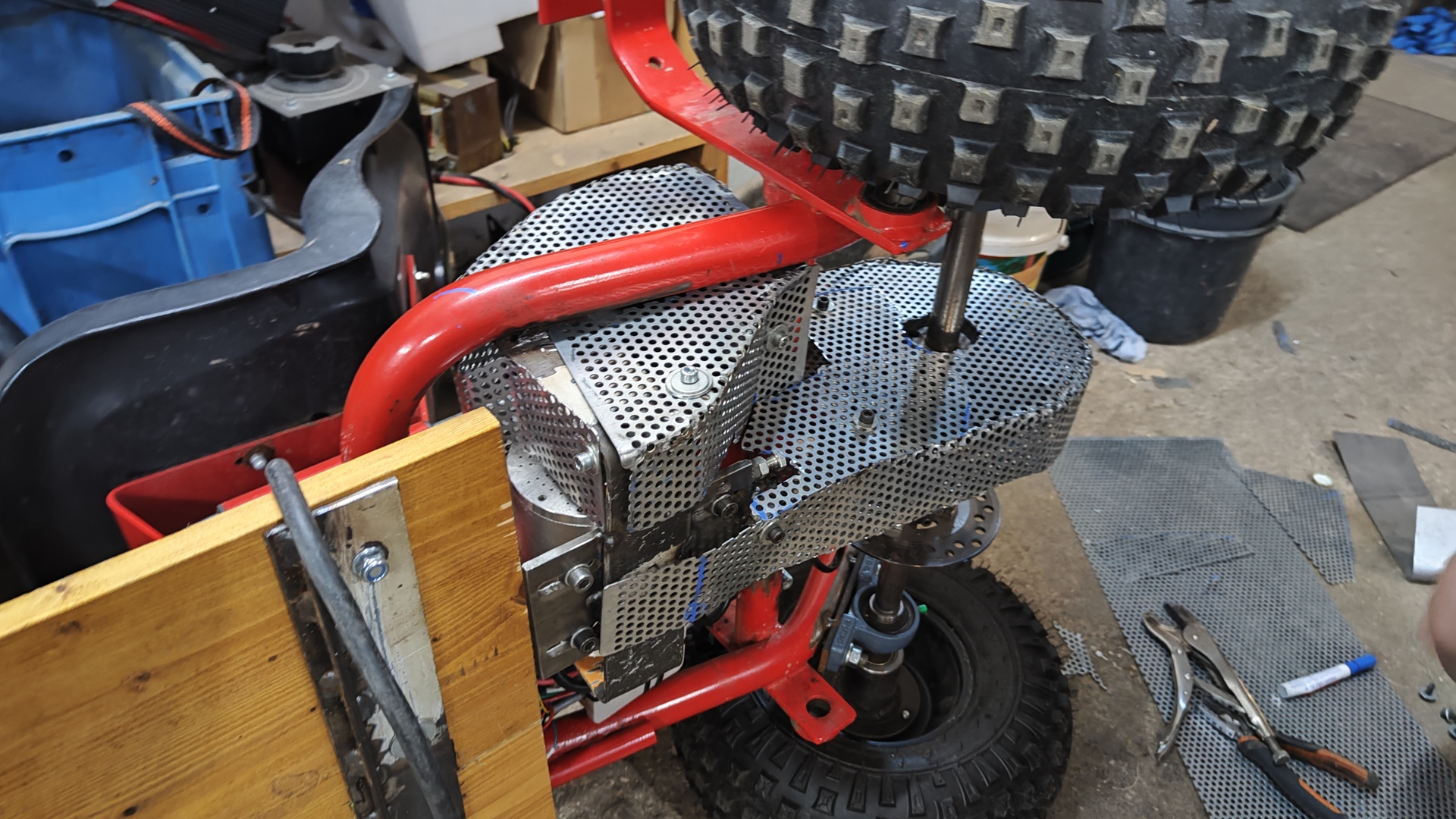
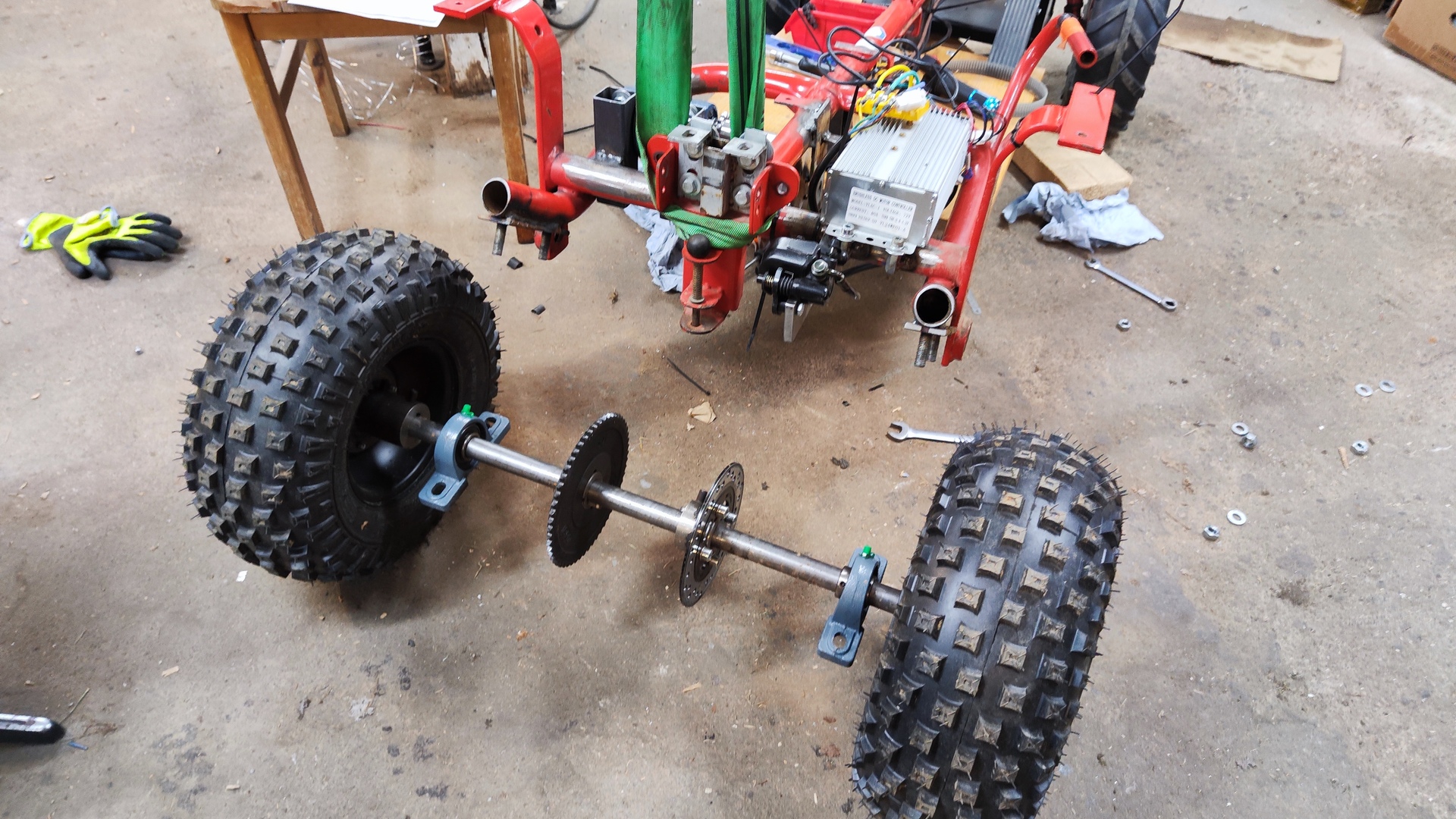
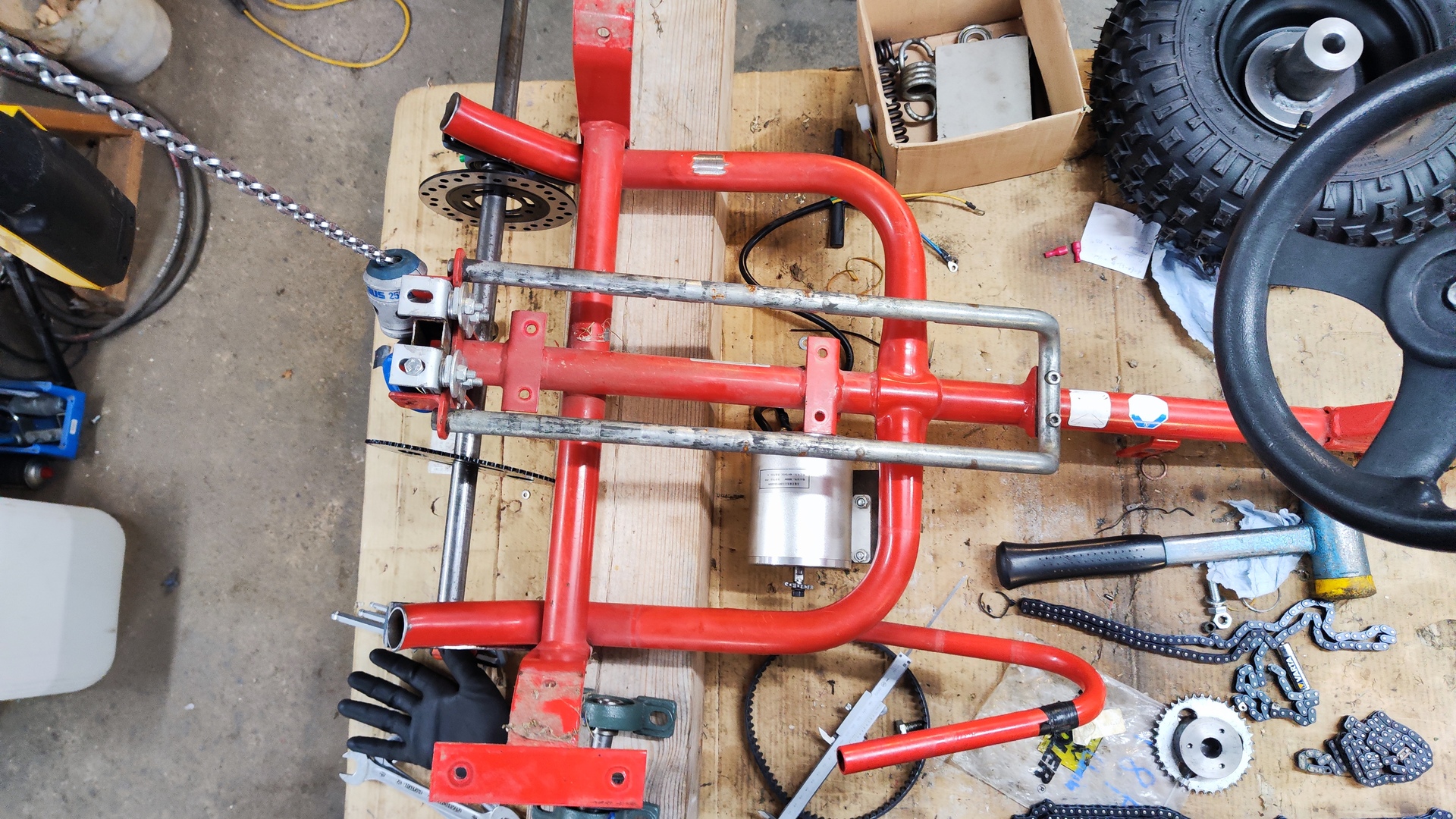
 Rear view with axle fully assembled
Rear view with axle fully assembled
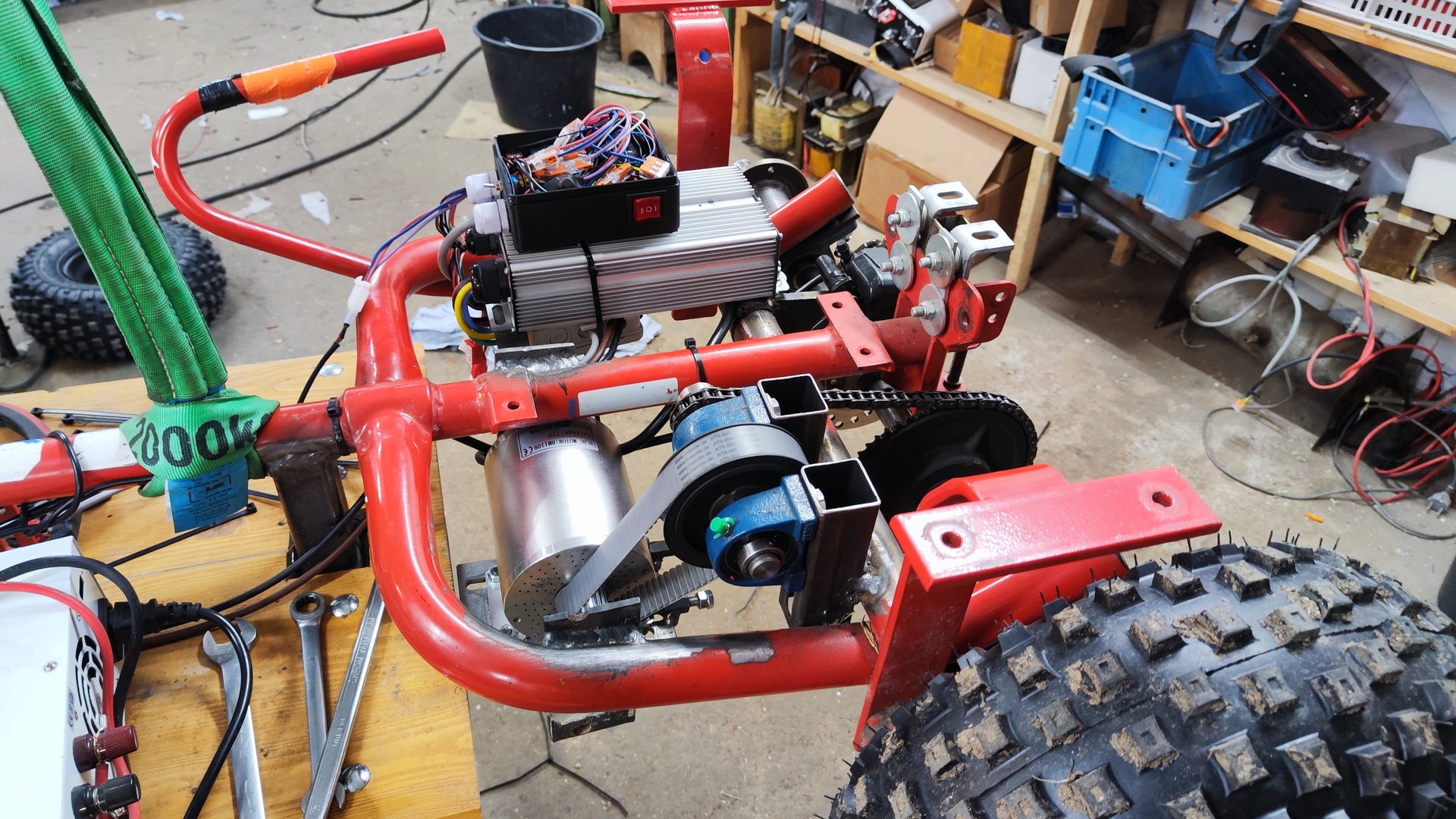
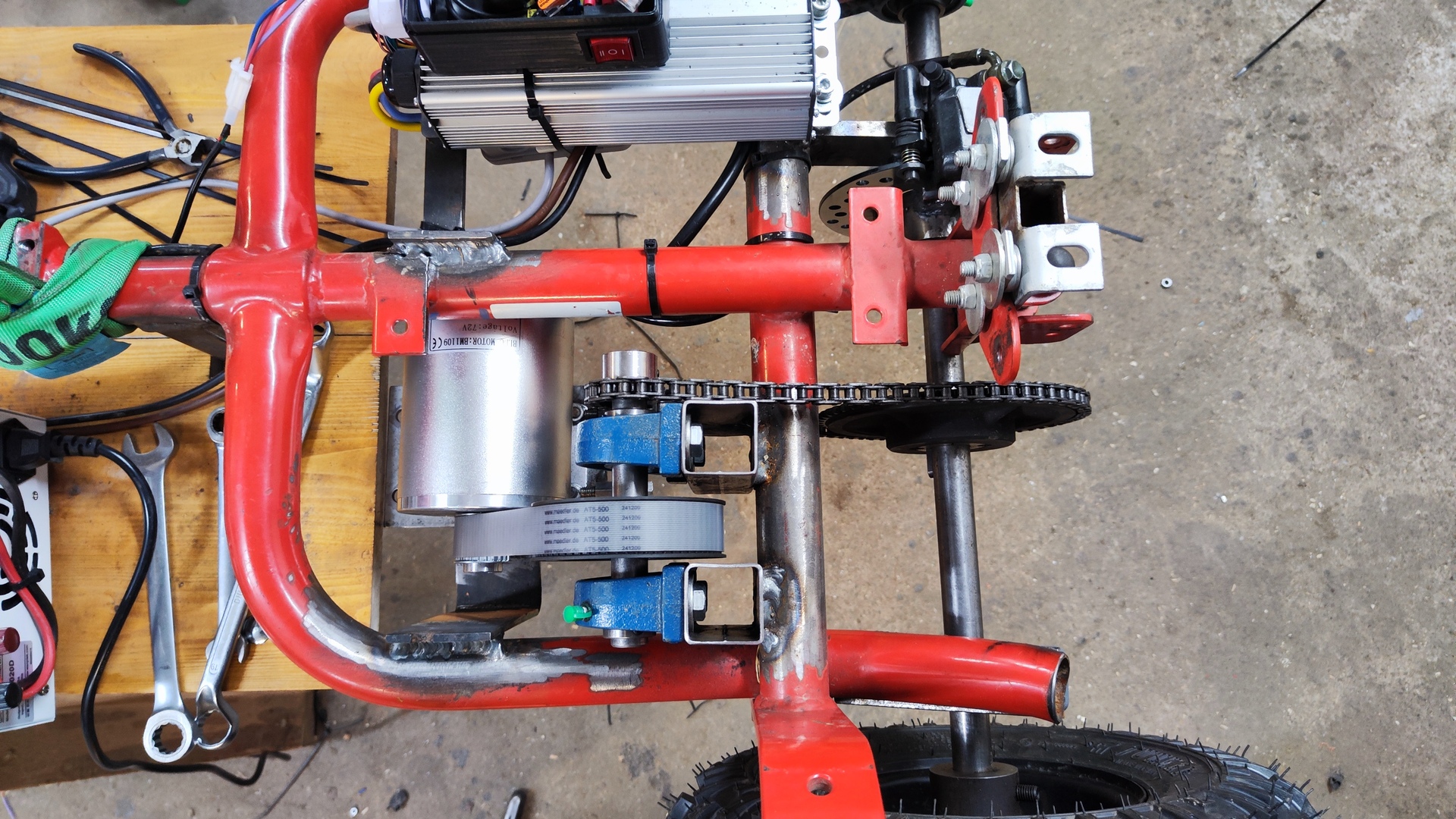
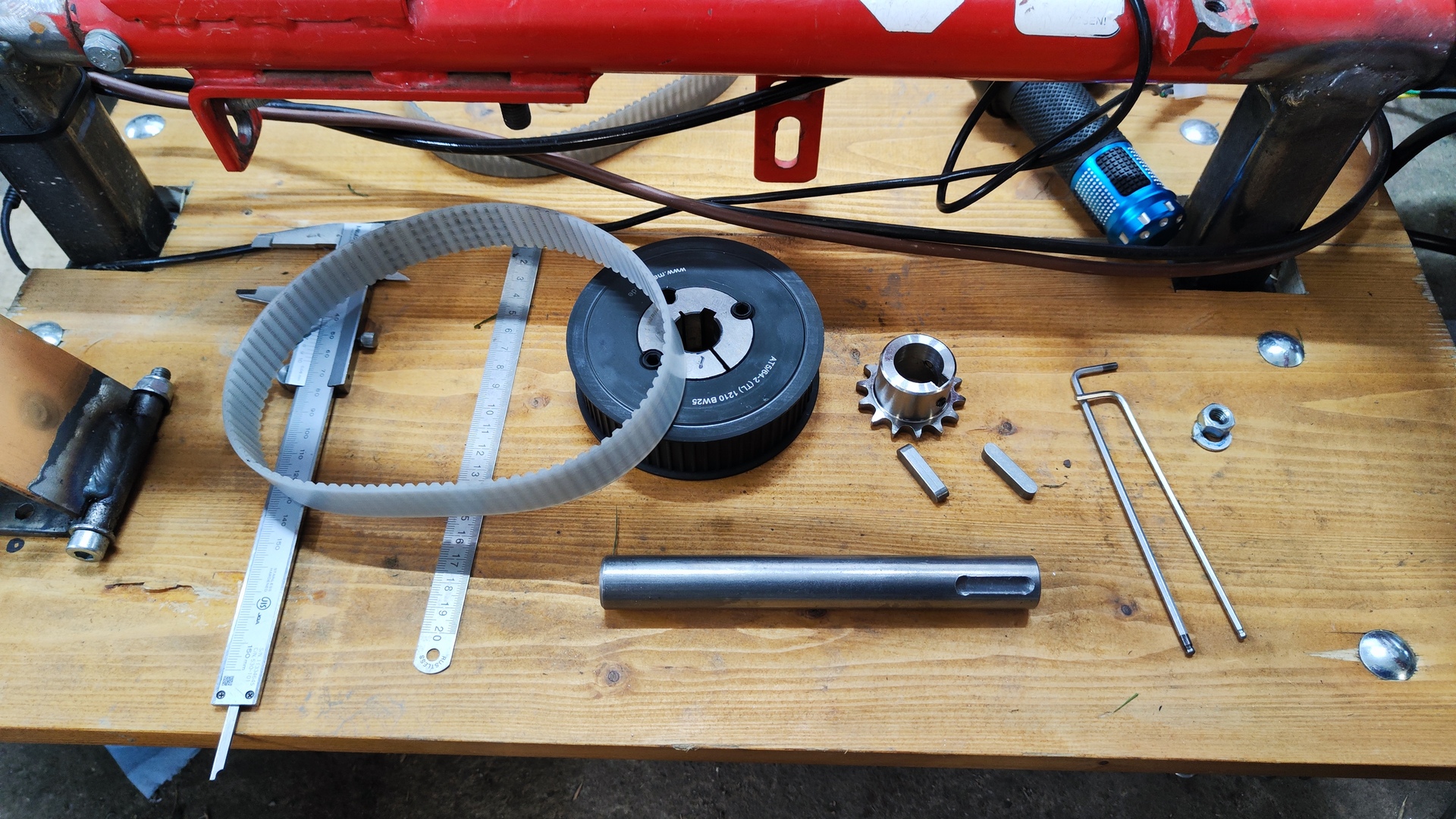
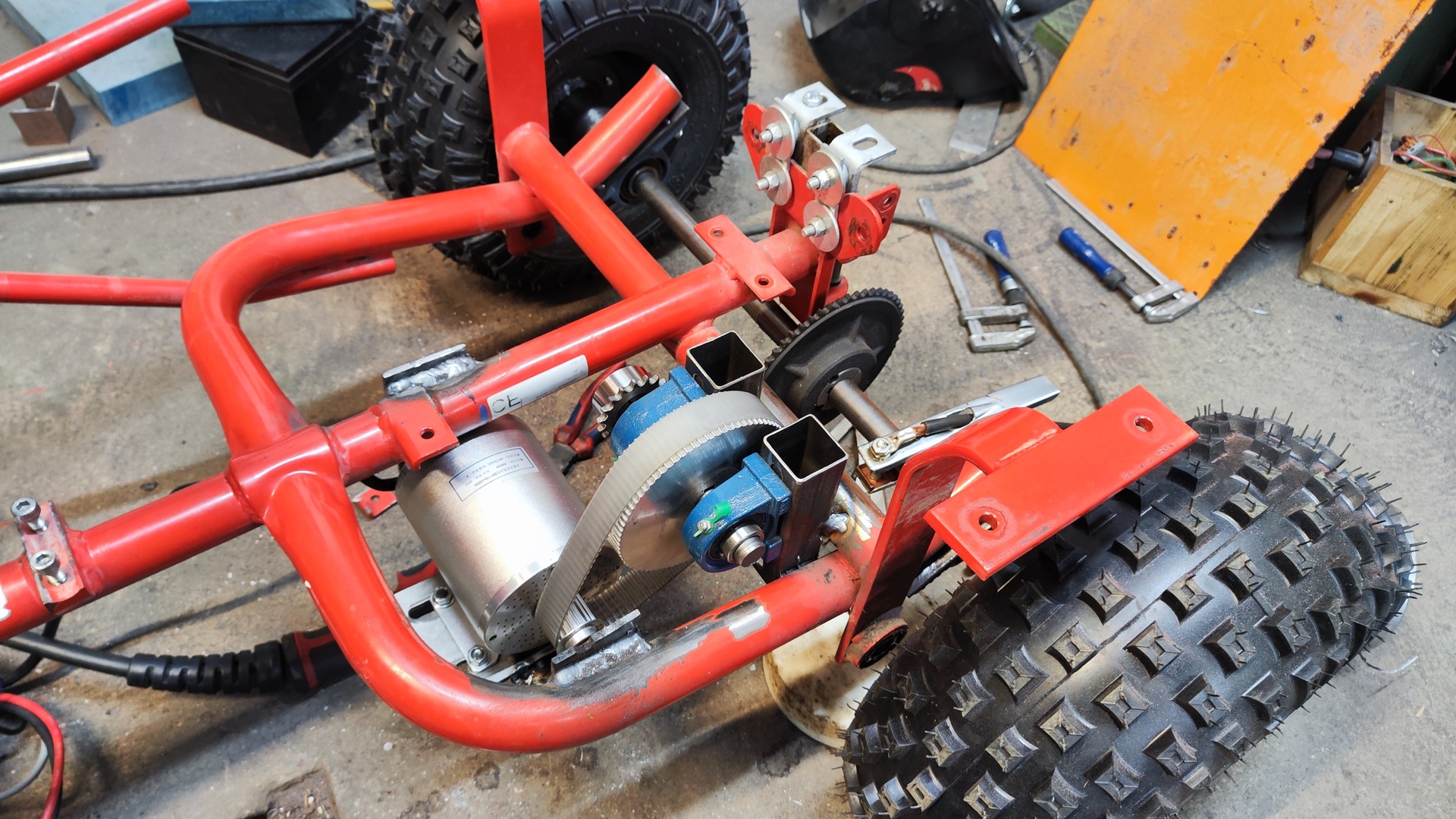
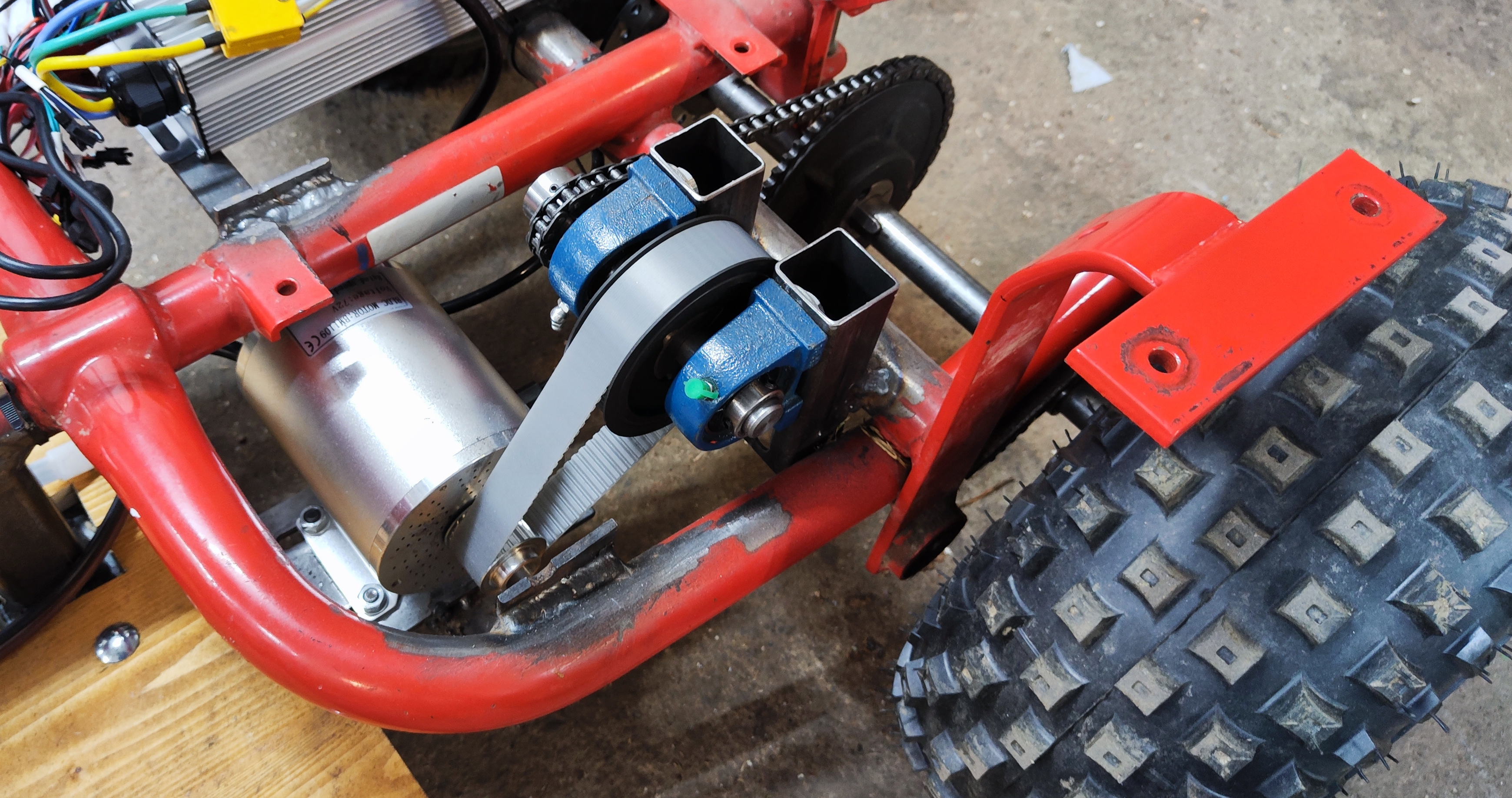 Drivetrain: Belt (Stage 1) and Chain drive (Stage 2)
Drivetrain: Belt (Stage 1) and Chain drive (Stage 2)
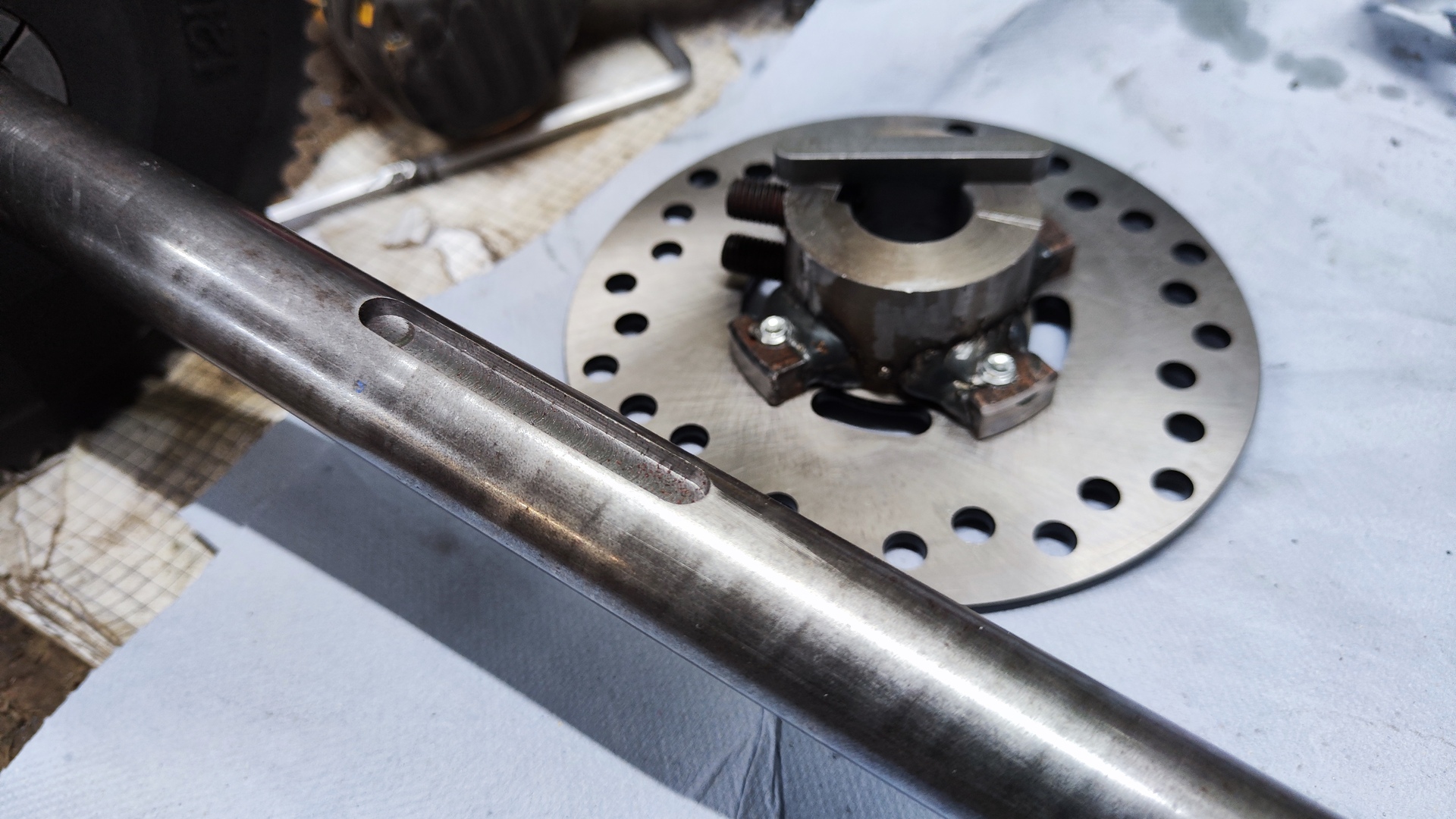
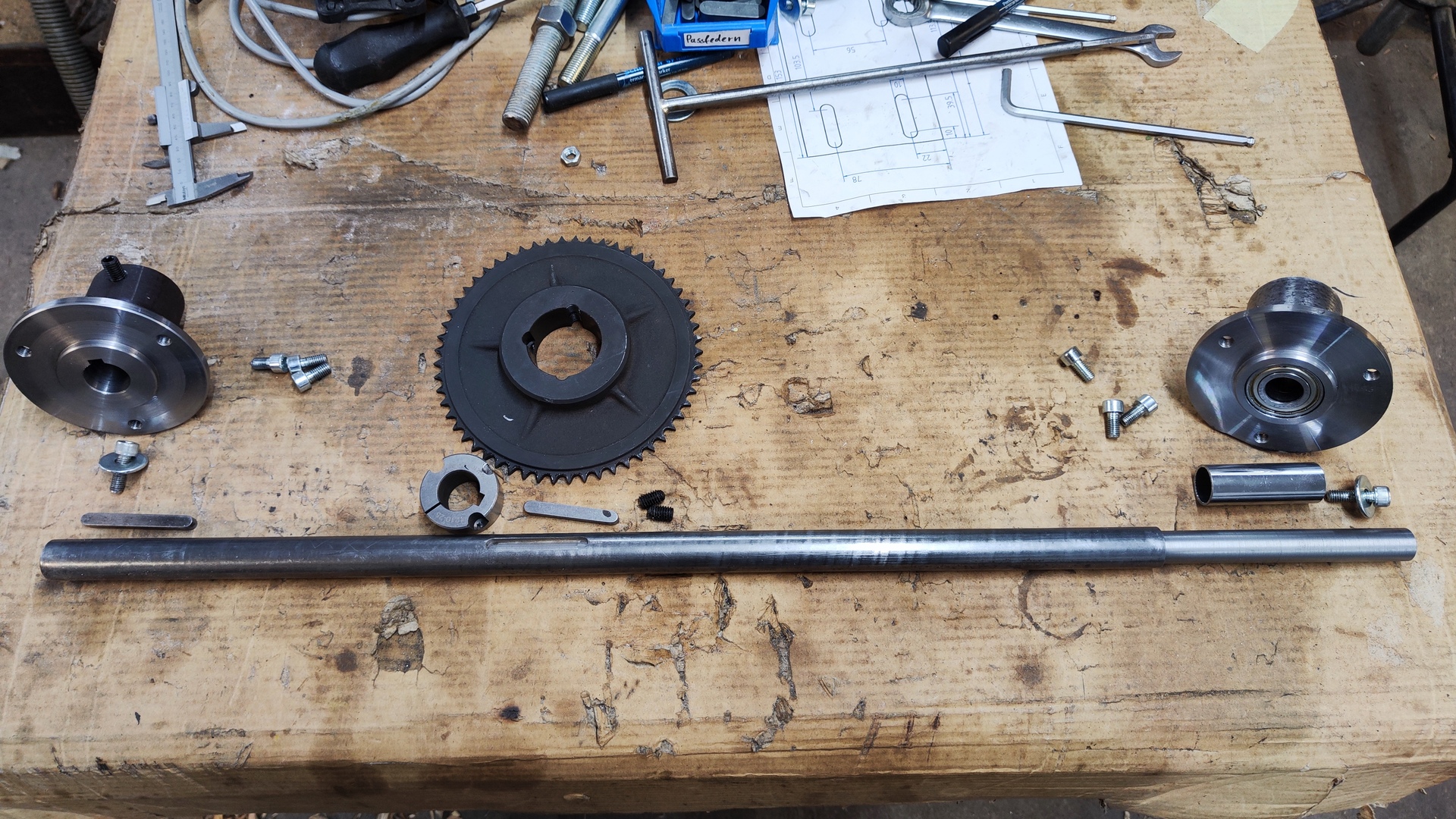
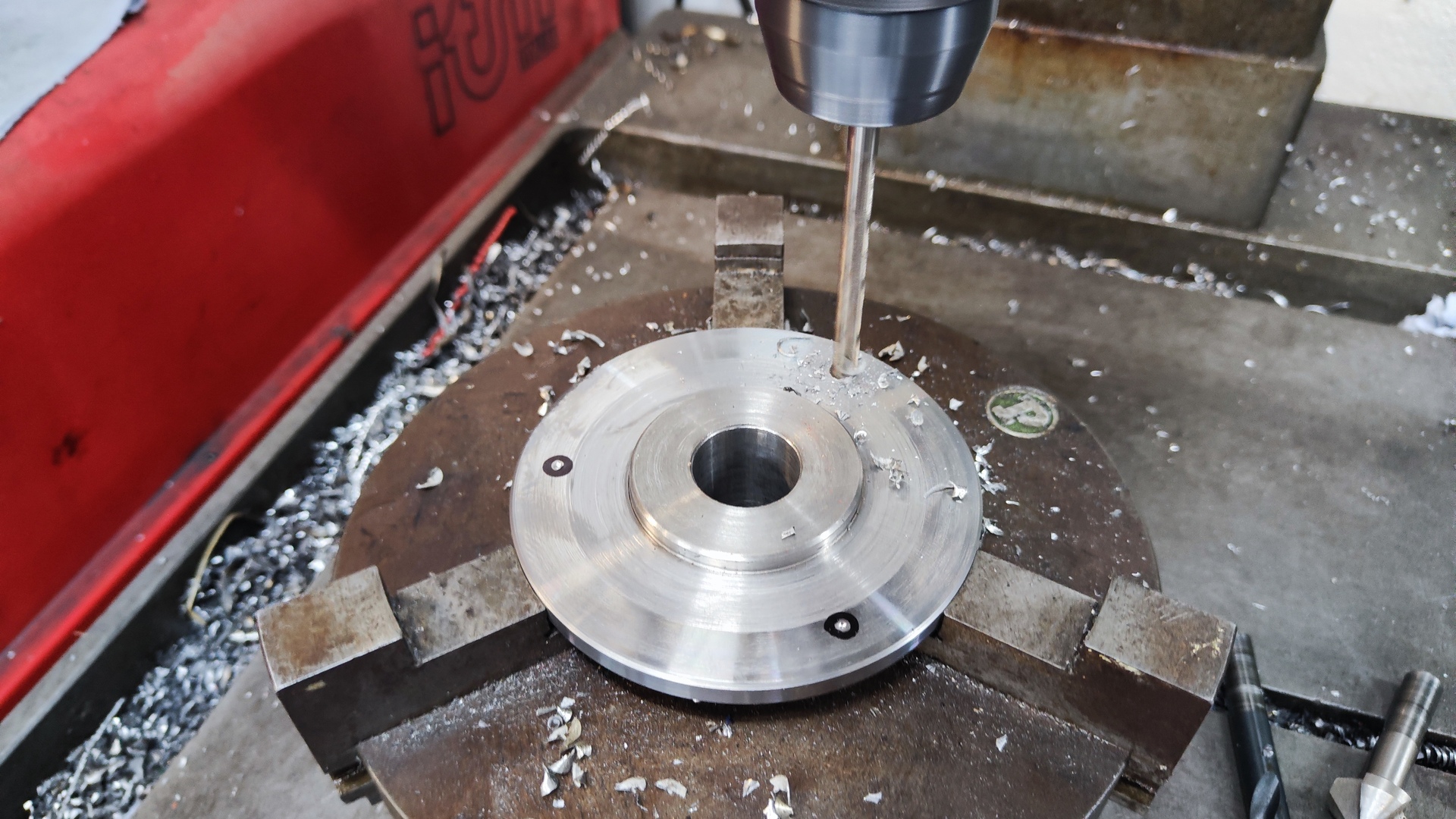
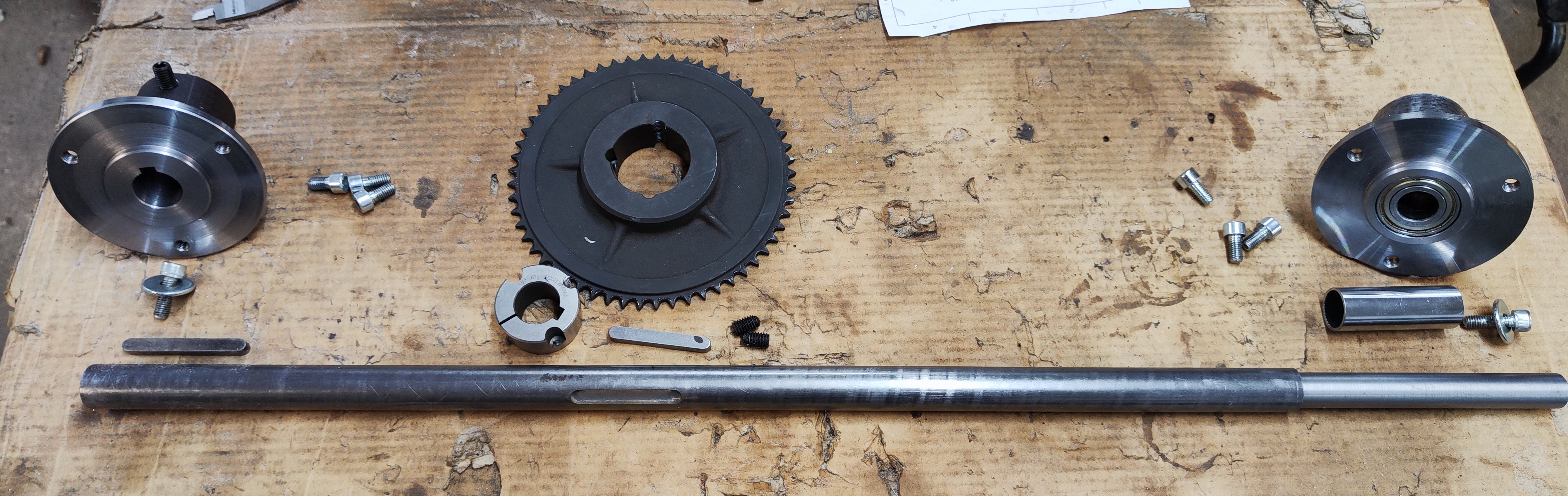 Rear axle with custom wheel hubs and milled key slots
Rear axle with custom wheel hubs and milled key slots
Motor & Control
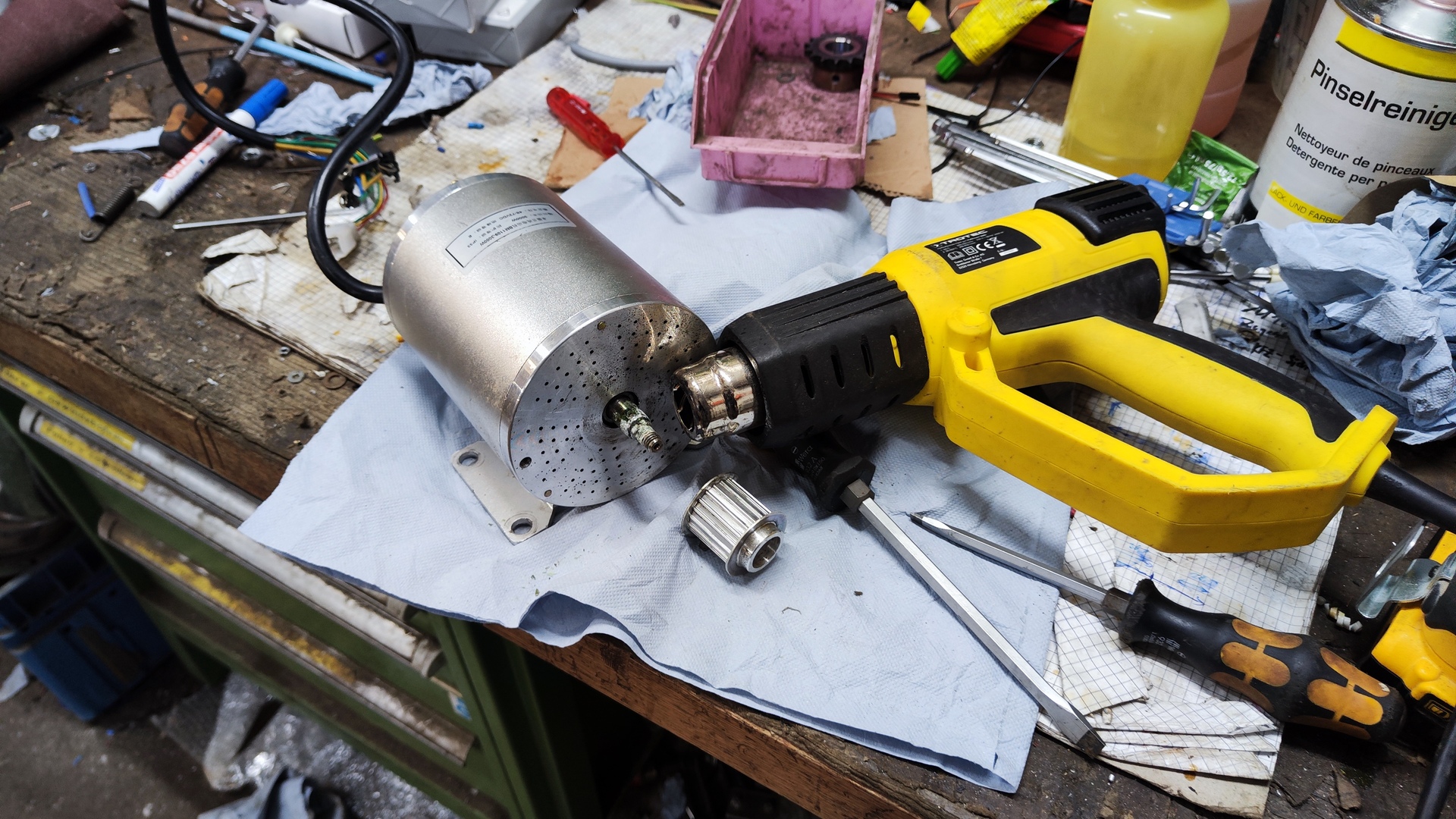
Motor
- Origin: Common “3000 W Go-Kart kit” motor (widely available)
- Power: 3000 W
- Voltage: 72 V
- Max DC current: 50 A
- Speed:
- Rated: 4900 rpm
- No-load: 6600 rpm
- Torque: 5.44 Nm
- Price: ~140 EUR
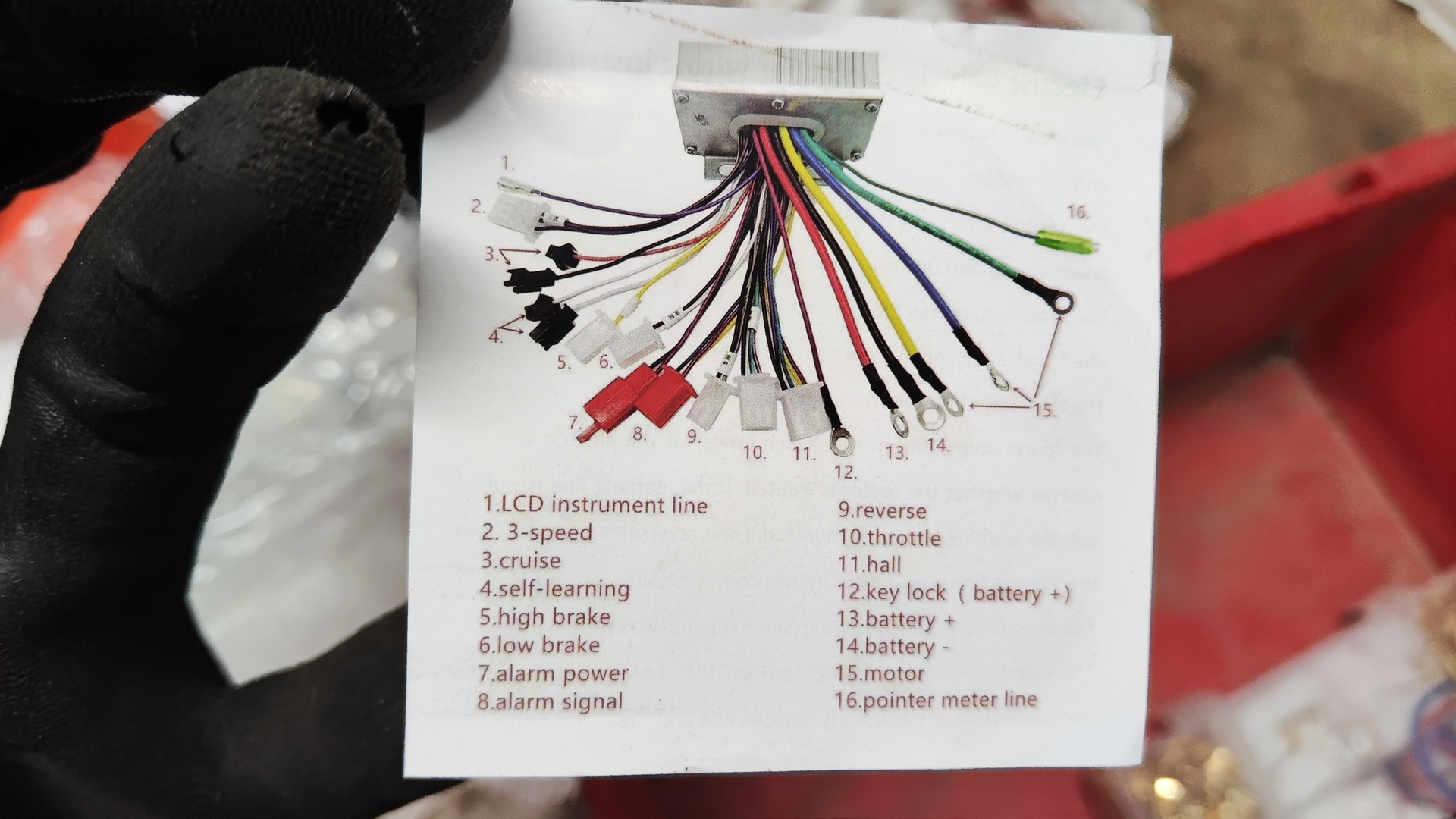
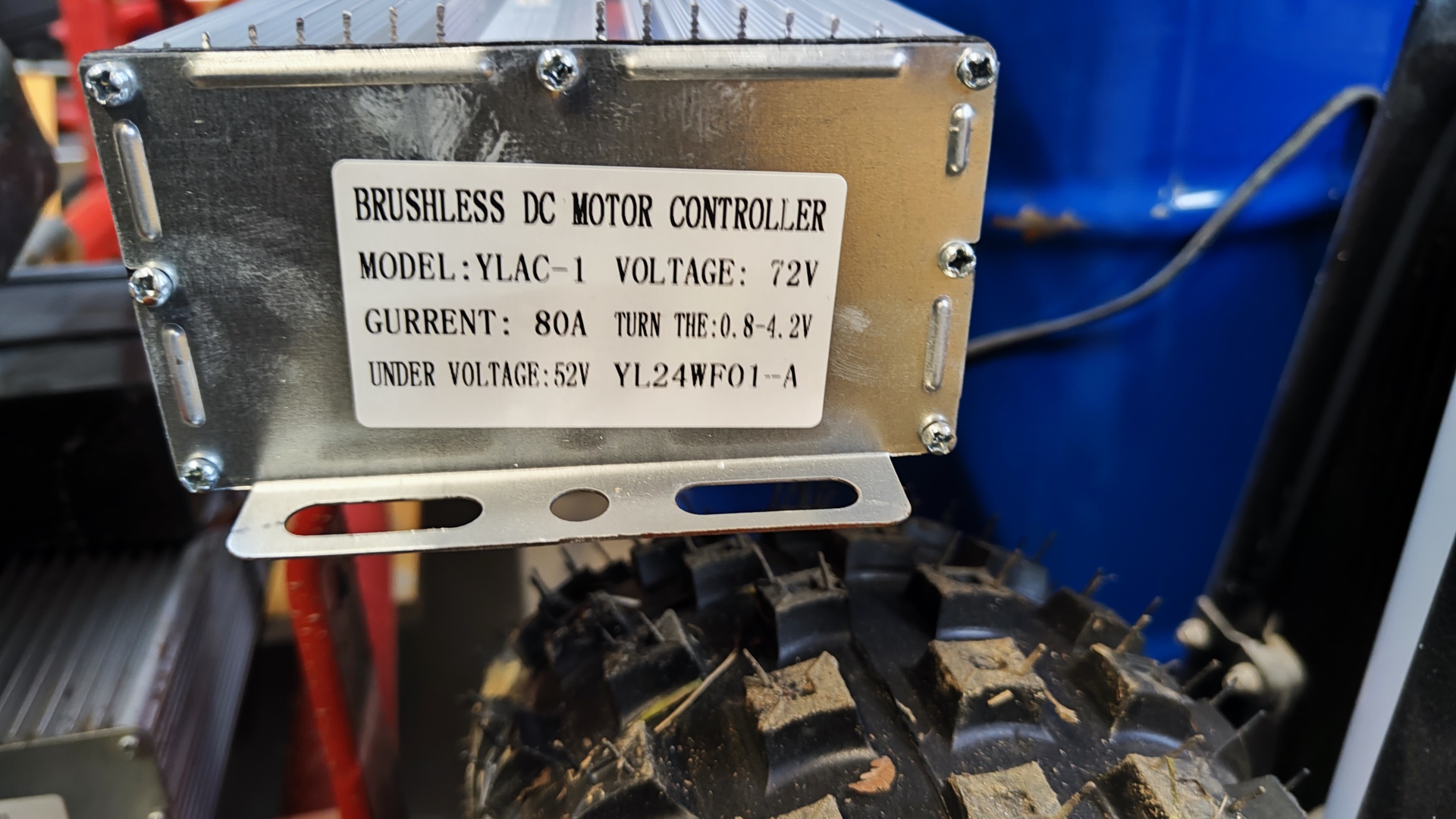
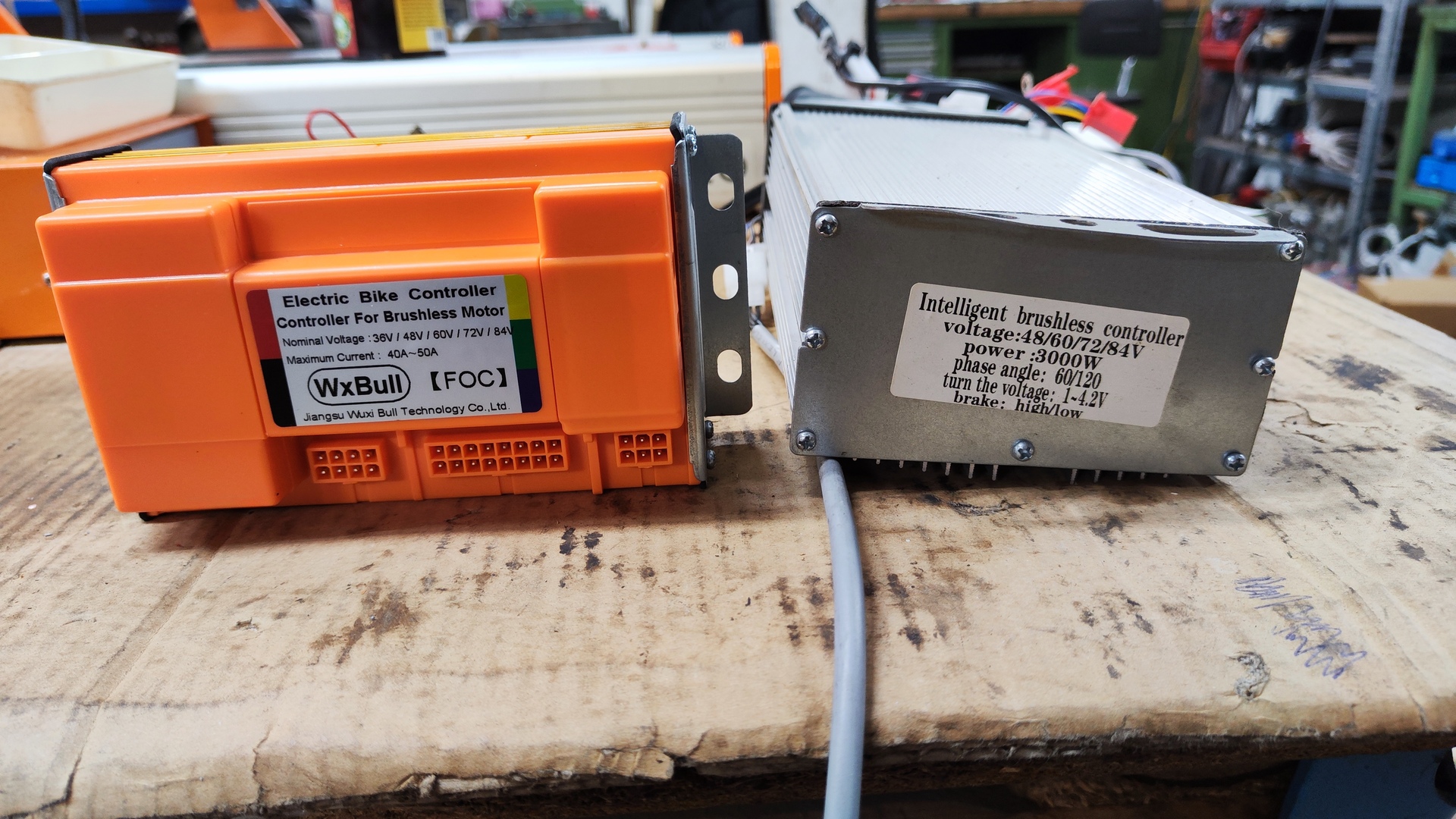
Motor Controller
- Generic 18-MOSFET BLDC controller
- Power: 3000 W
- Phase current: 80 A
- Rated Voltage: 48/60/72/84 V
- Price: ~30 EUR
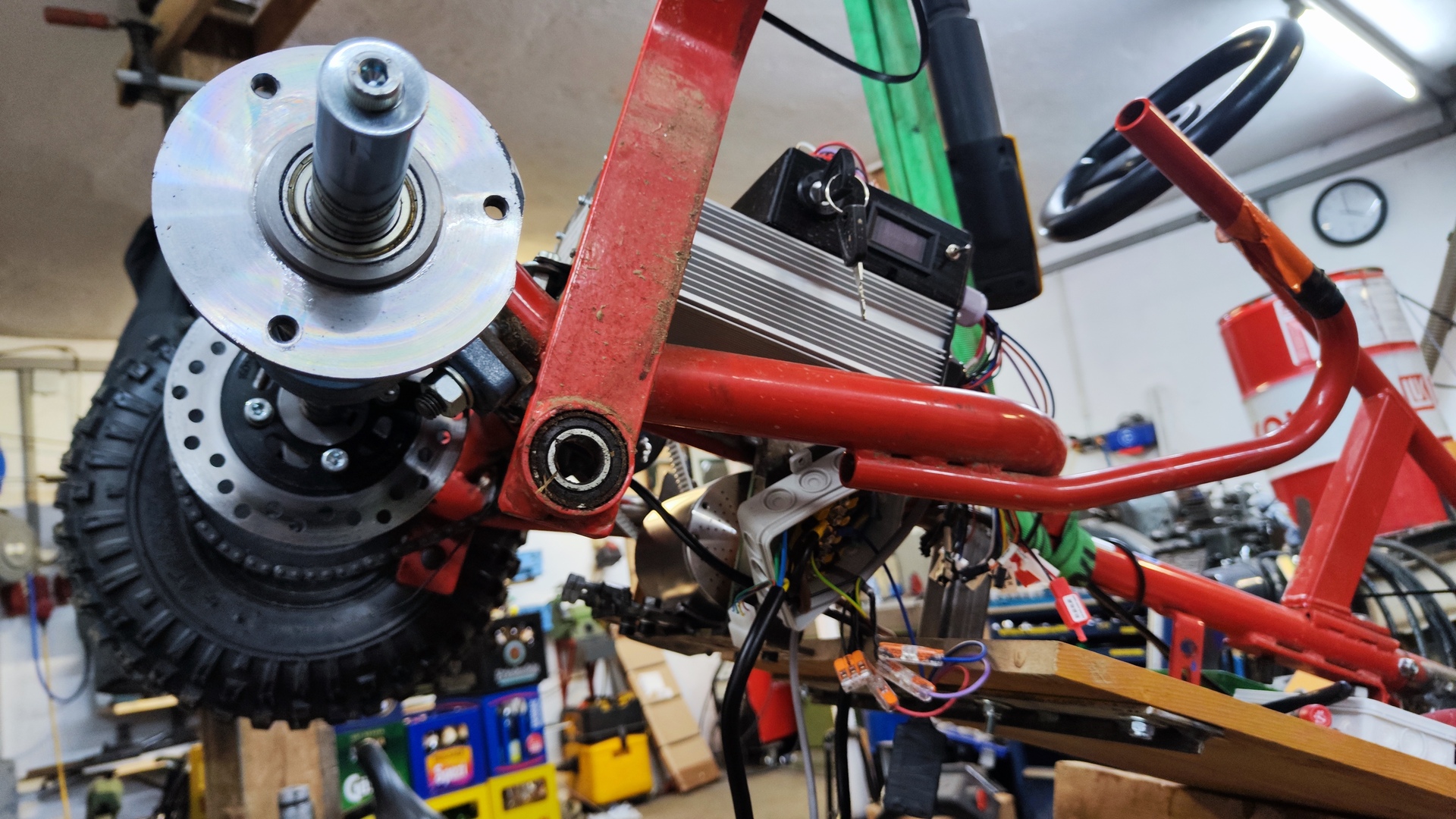
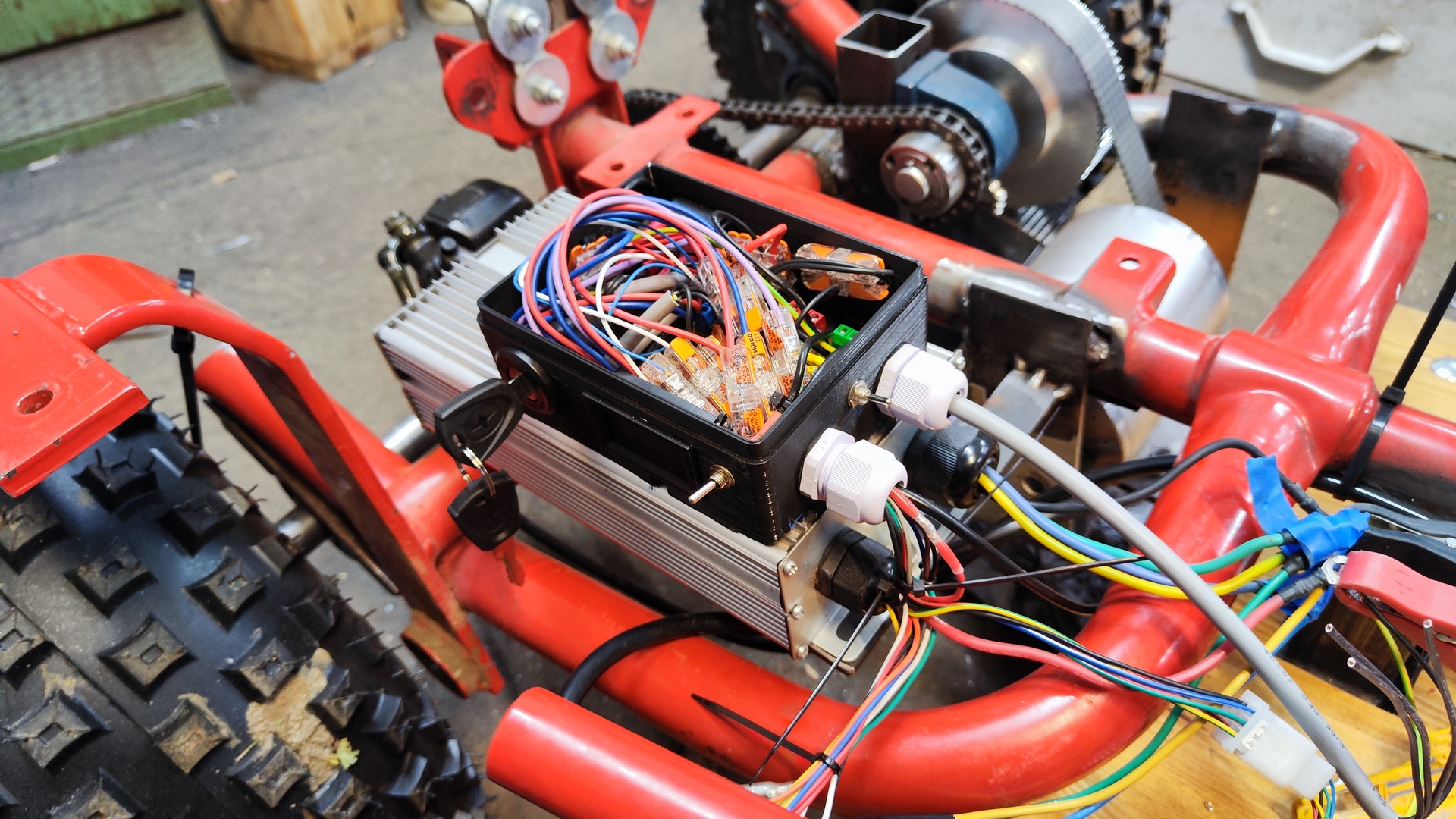
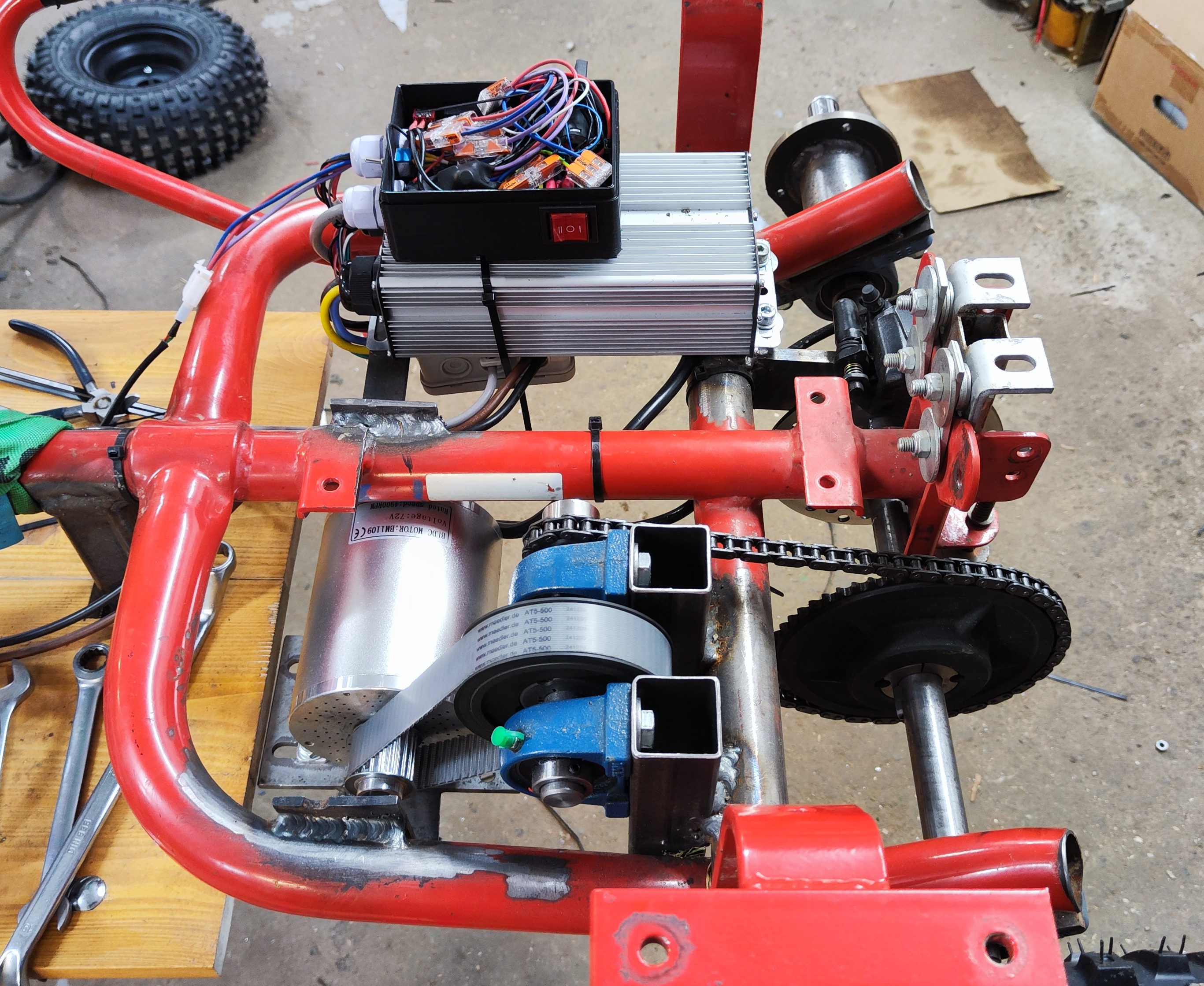 Integrated motor with controller and control box in the background
Integrated motor with controller and control box in the background
Control Box
- Purpose: Custom board connected between pedal and controller for smoother throttle and fully customizable speed modes
- MCU: ATmega8
- Key features:
- Throttle remap
- Ramp-up
- 3 speed levels + sport mode
- Reverse + headlight switch
- Battery indicator
- Build: CNC-milled single-sided PCB, through-hole, 3D-printed housing
- Firmware: GitHub - throttle-tune
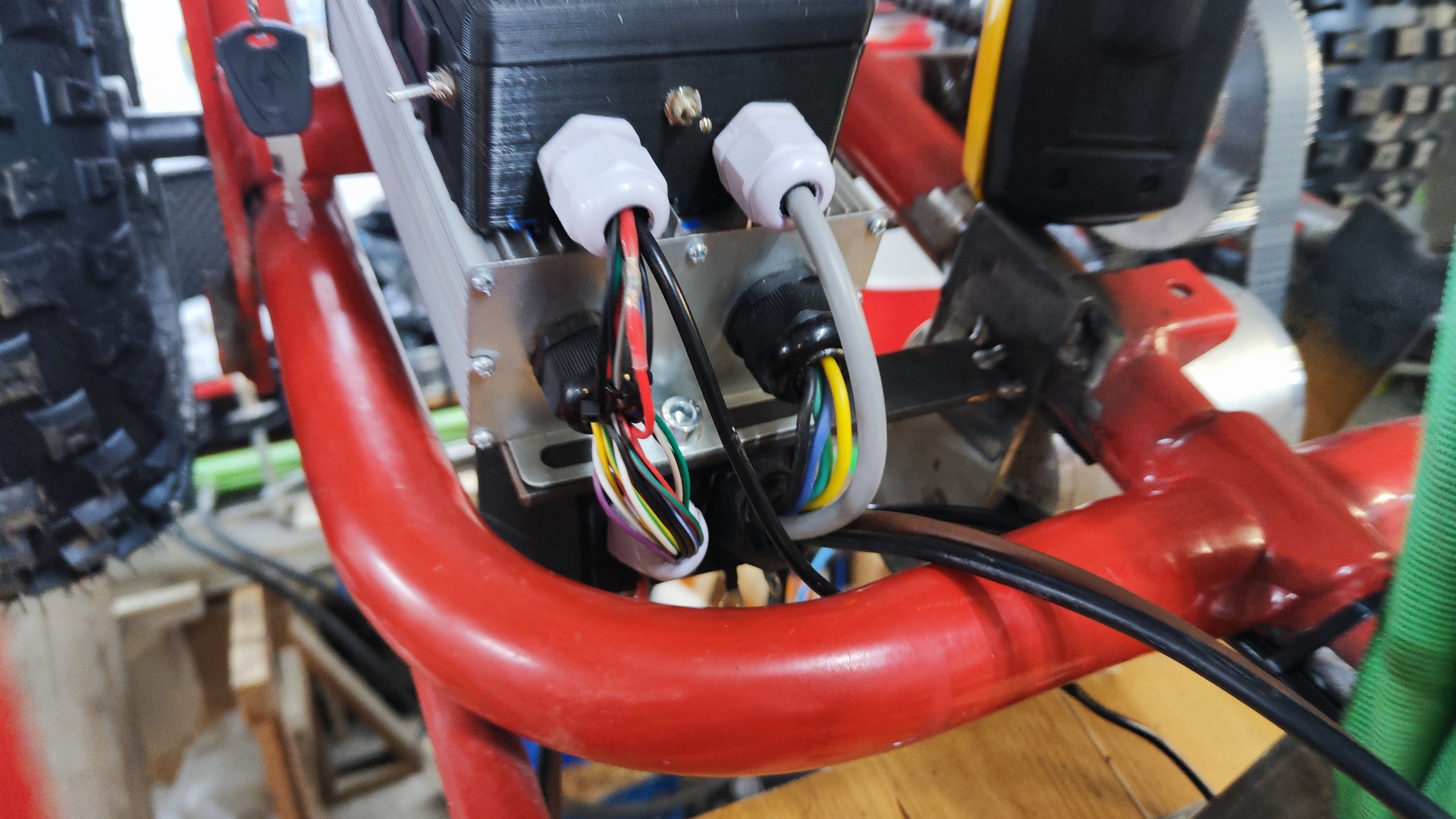
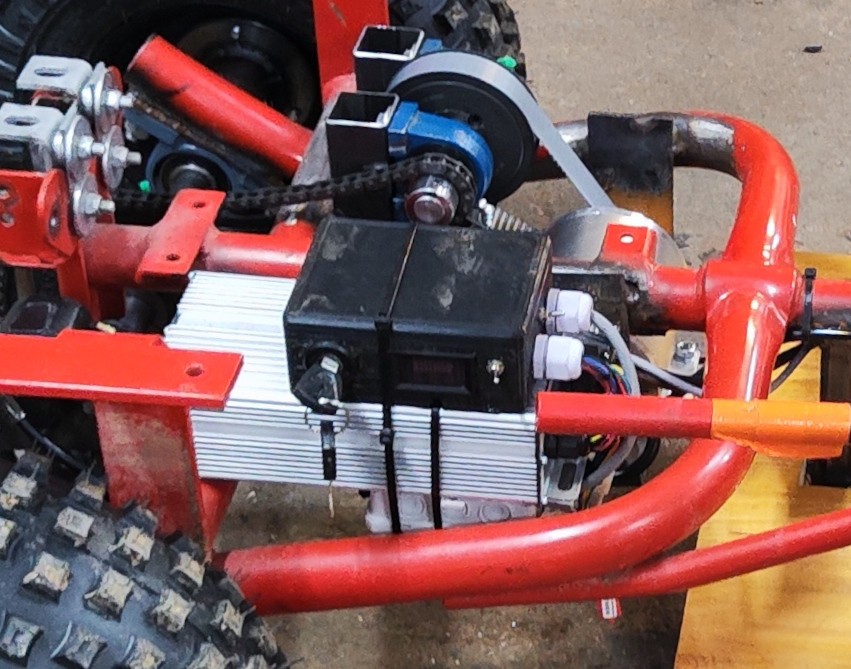 Mounted control box with key switch, battery indicator, and UI switches
Mounted control box with key switch, battery indicator, and UI switches
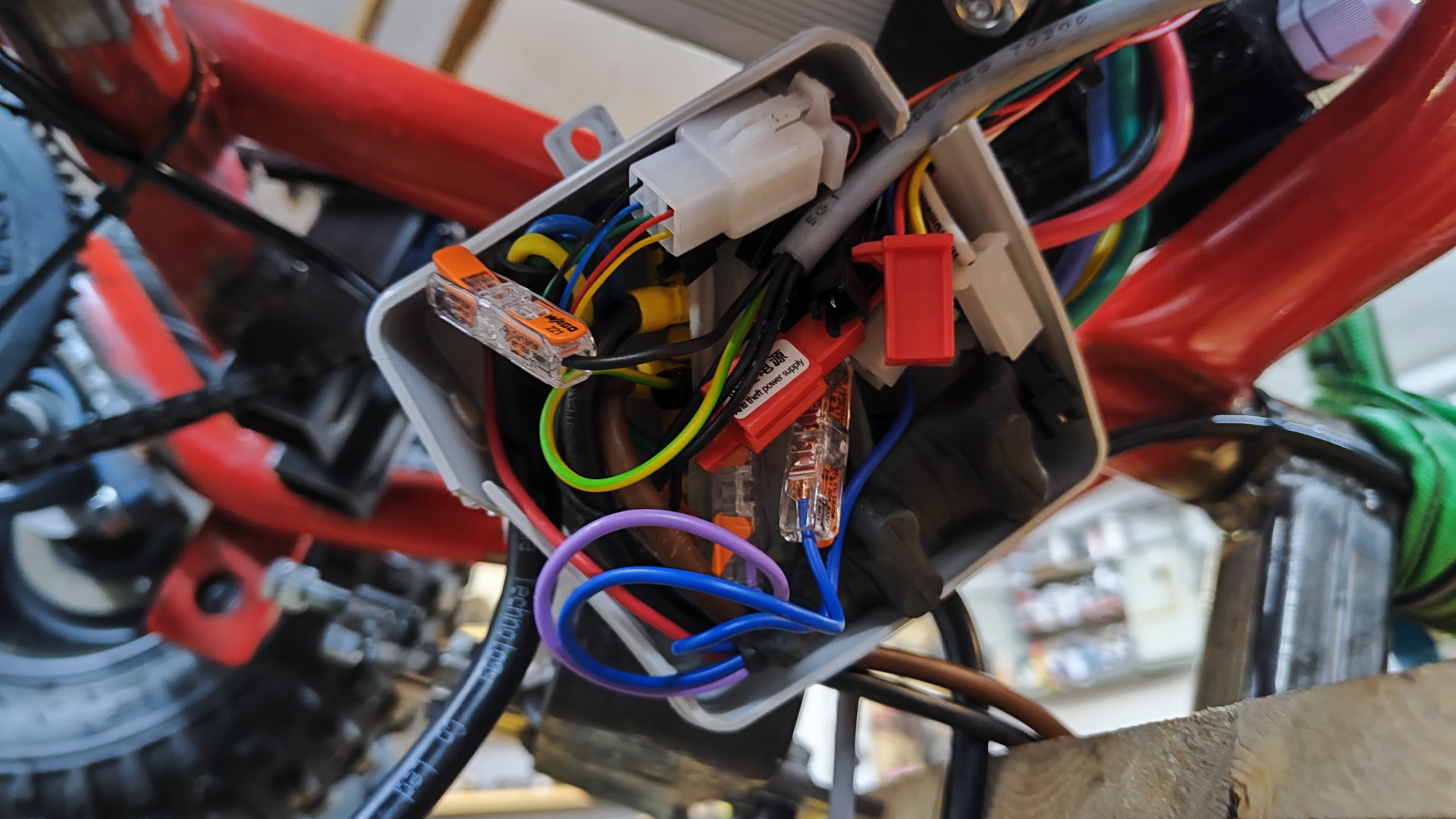
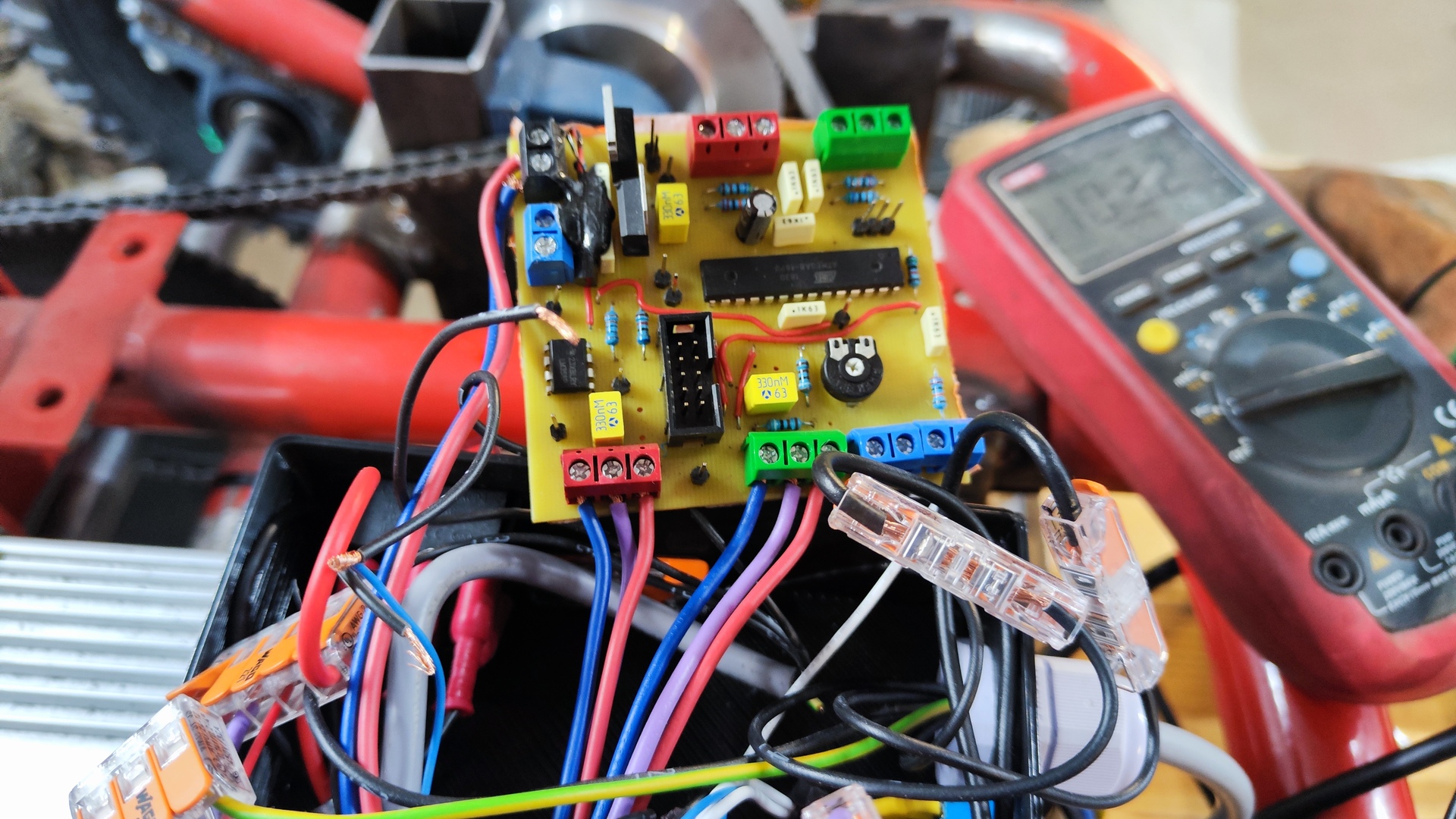
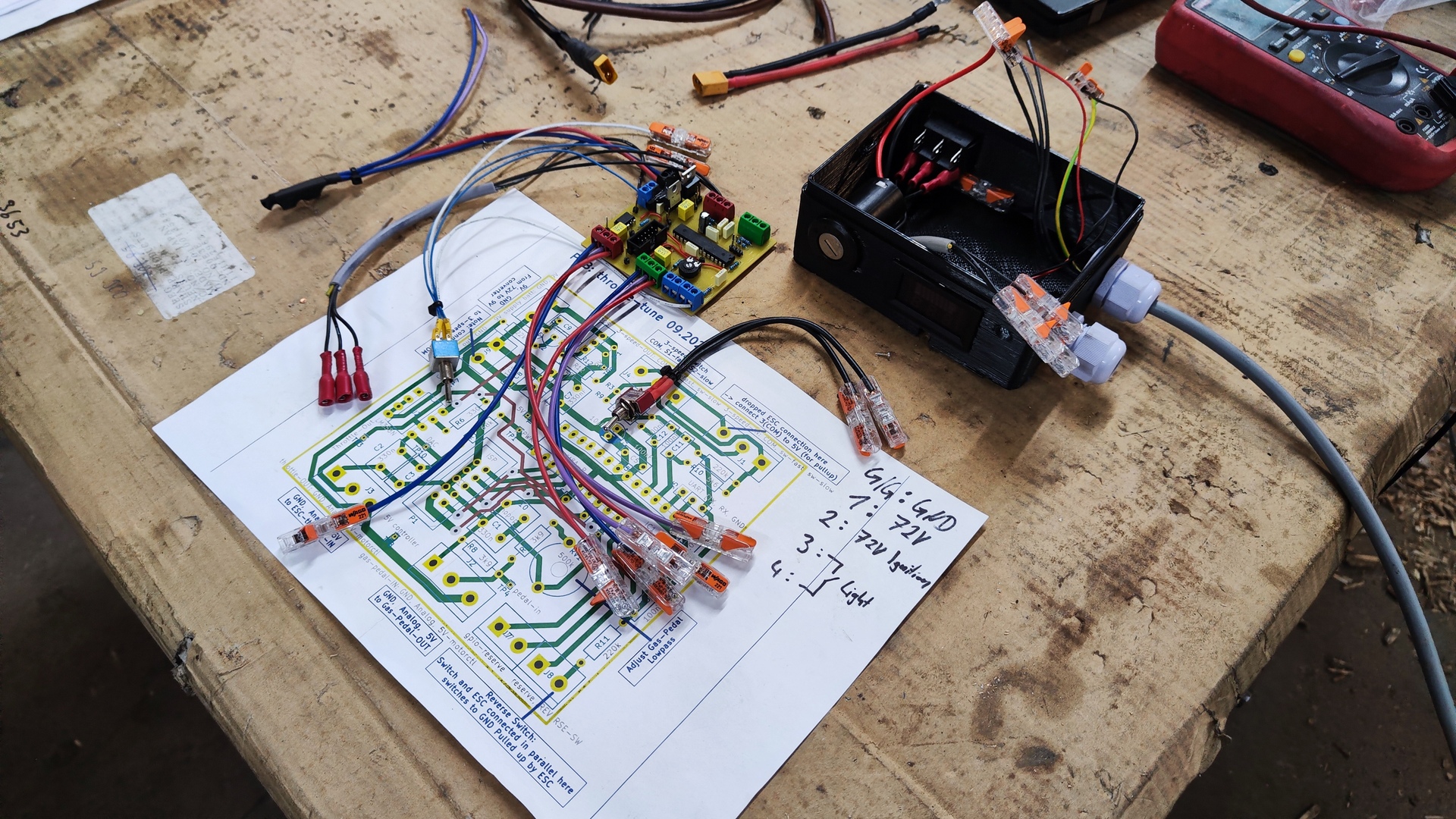
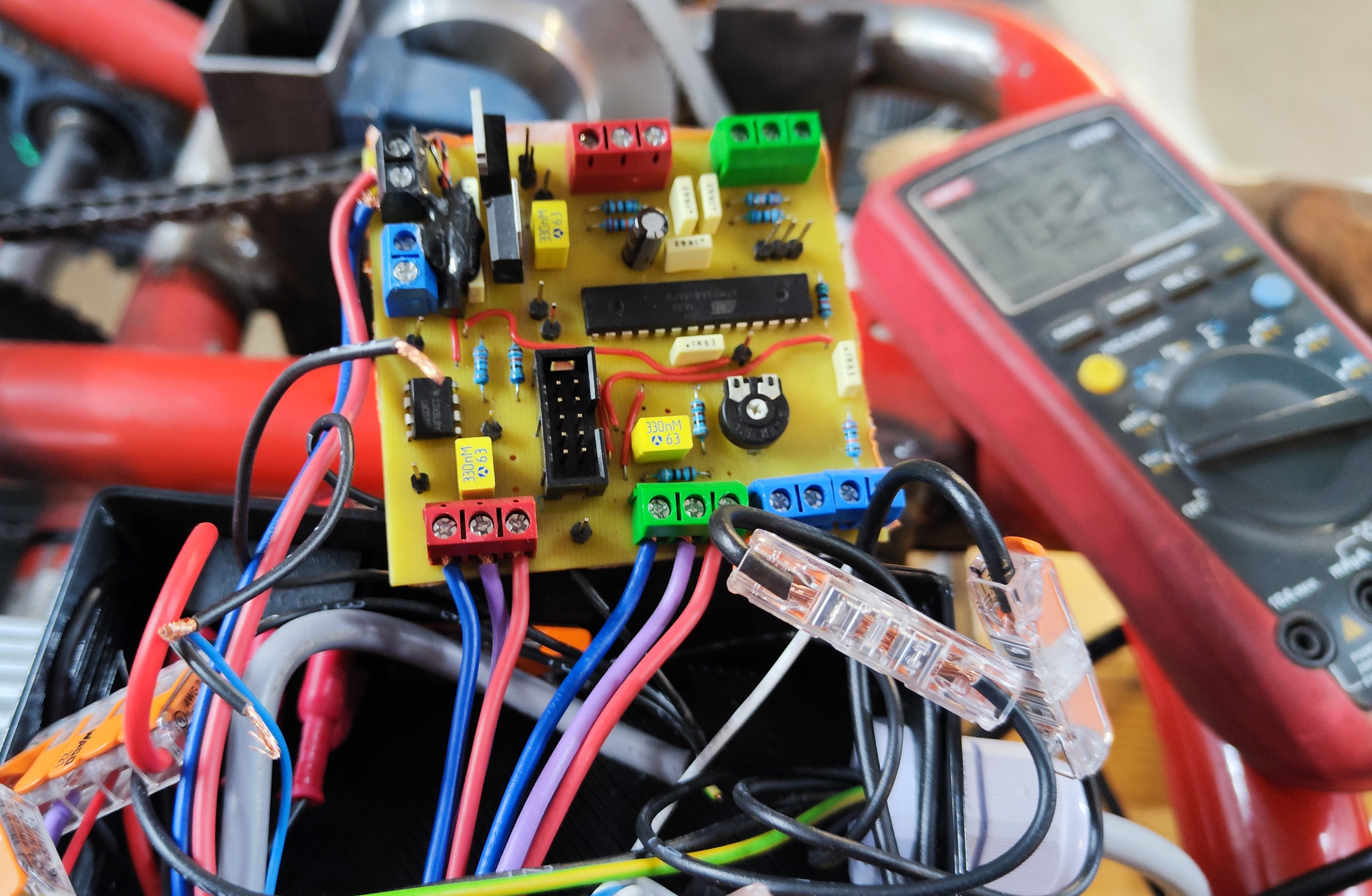
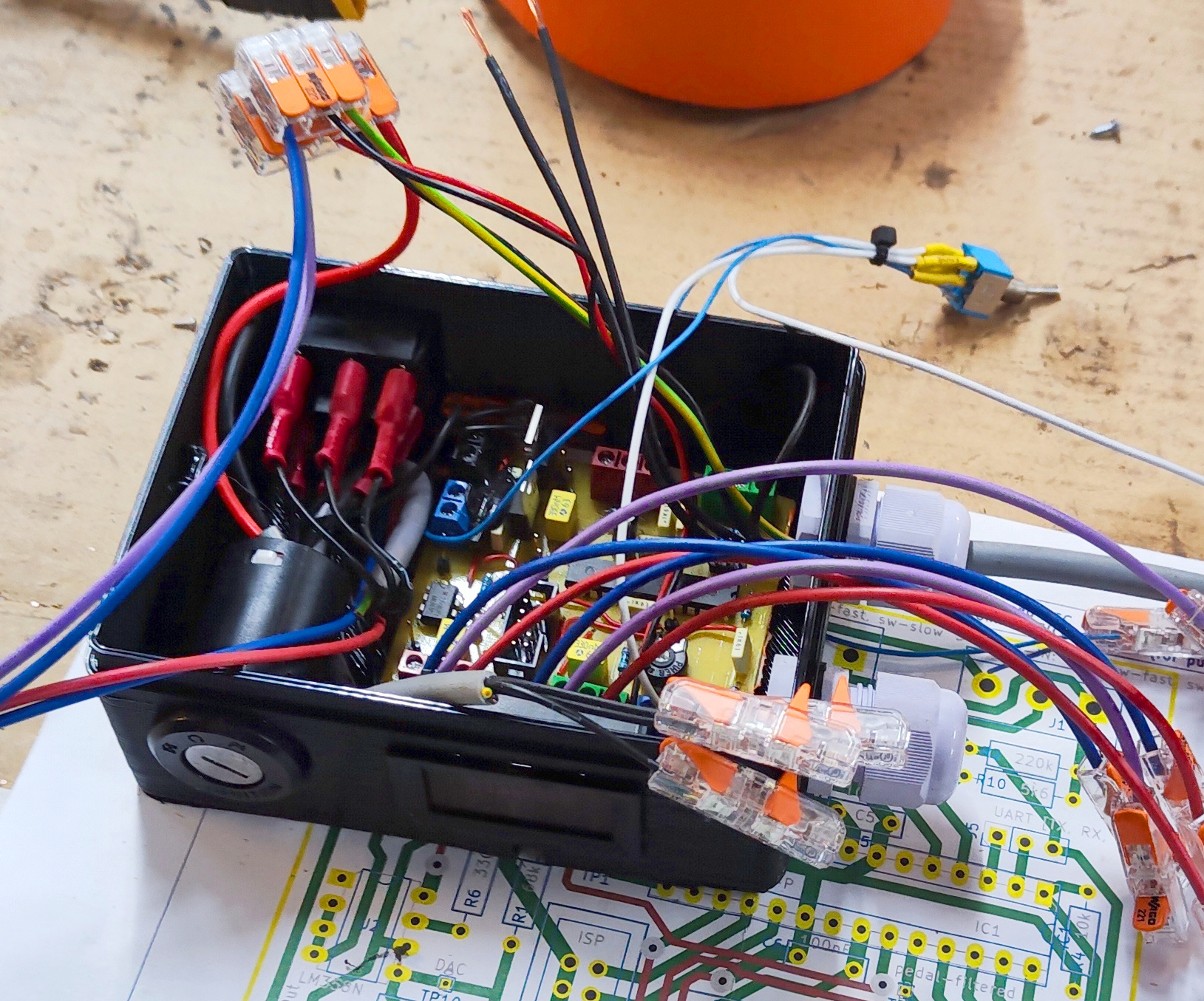 Open box during wiring - custom PCB and internal connections visible
Open box during wiring - custom PCB and internal connections visible
Battery
- Type: Commercial Li-ion pack
- Rating: 72 V, 25 Ah (1.8 kWh)
- Max current:
- Peak: 180 A
- Continuous: 60 A (60 A BMS)
- Split BMS (separate charge and discharge port)
- Charger: 84 V, 4 A
- Cell arrangement: 20S 9P (180 cells)
- Price: 563 EUR
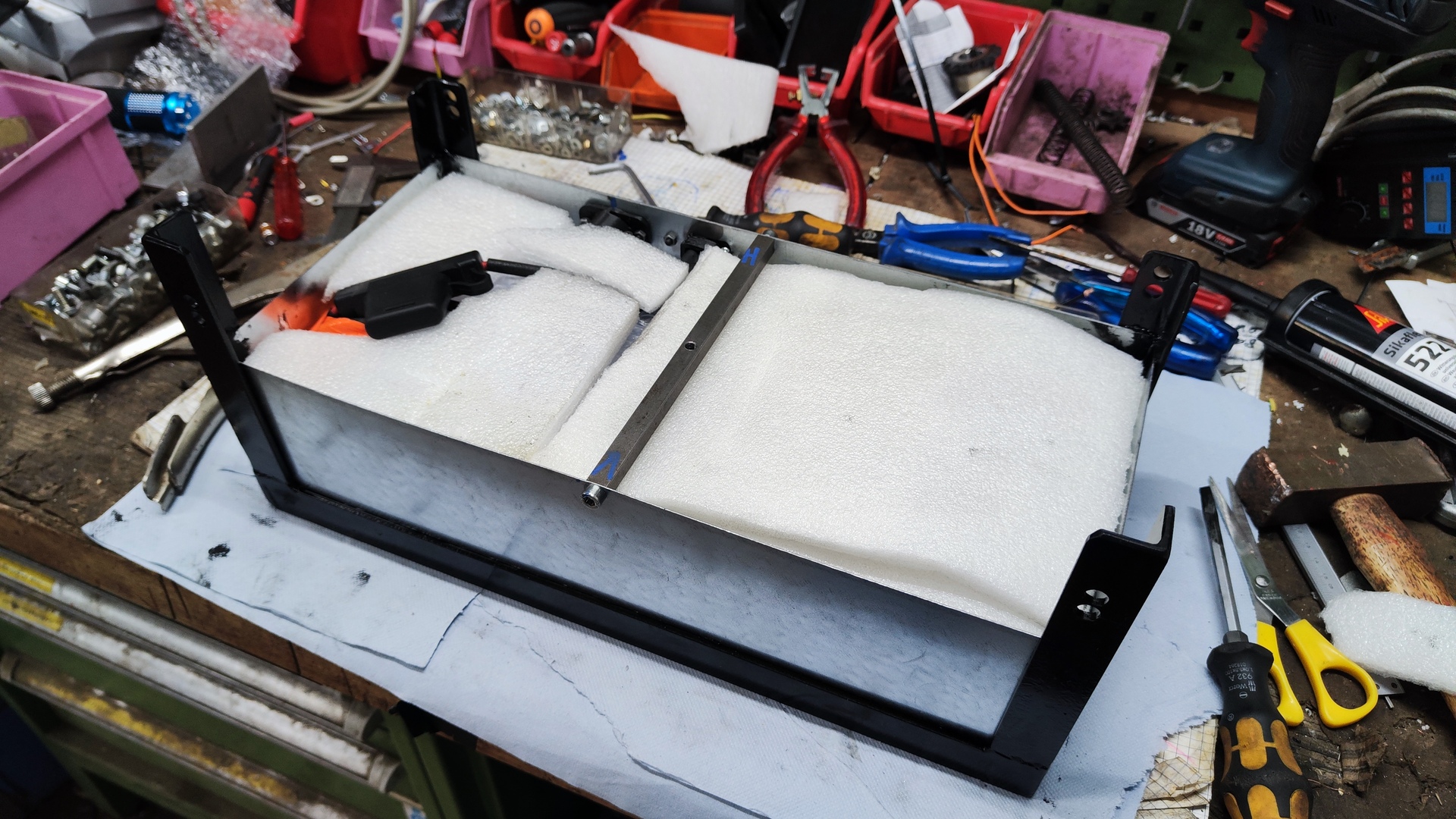
- Mounted in custom angle iron frame with sealed sheet-metal housing for front-end exposure protection
- Integrated fuse and XT60 connector
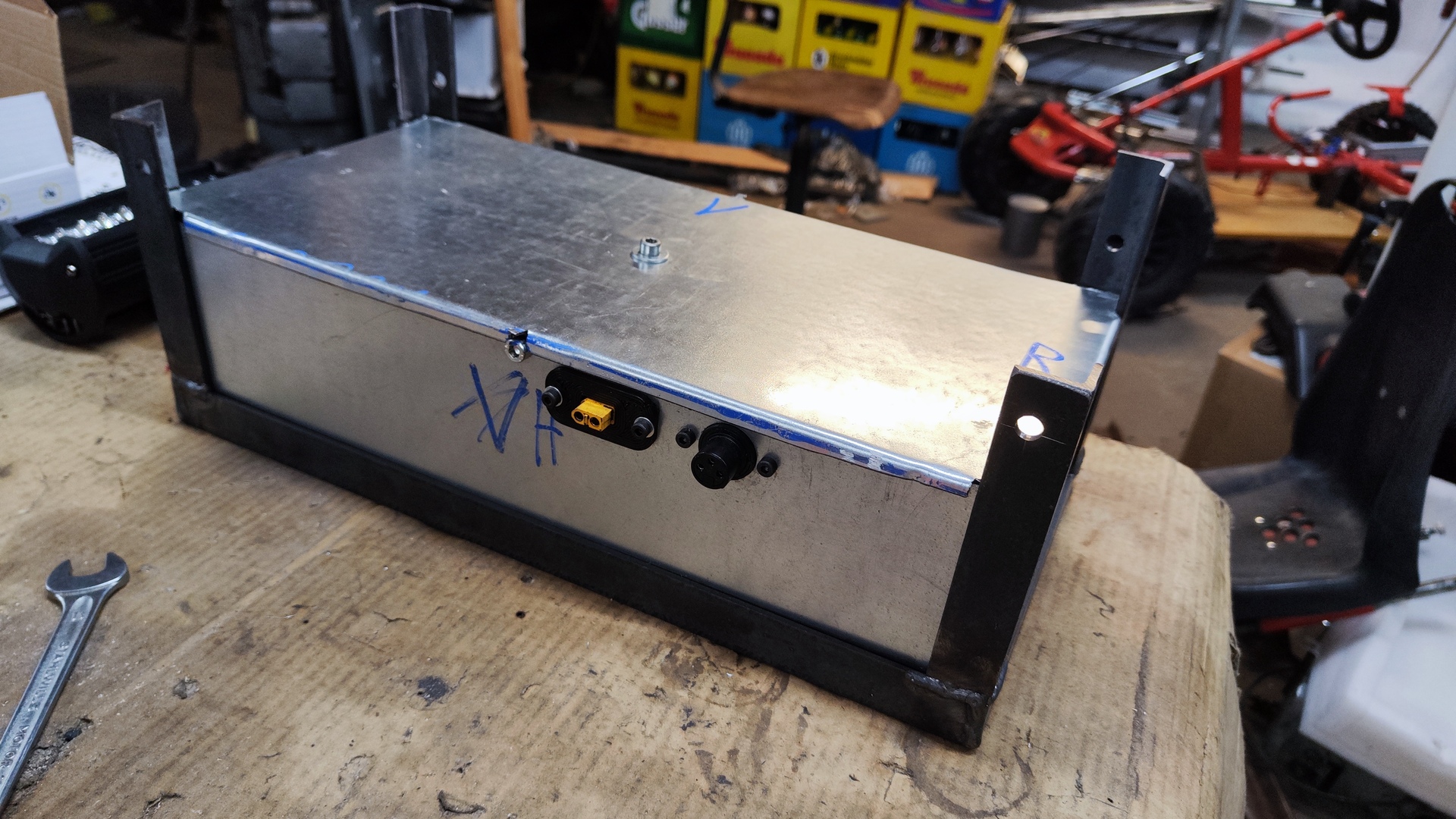
 Battery pack inside metal enclosure mounted between the front wheels, minimal clearance.
Battery pack inside metal enclosure mounted between the front wheels, minimal clearance.
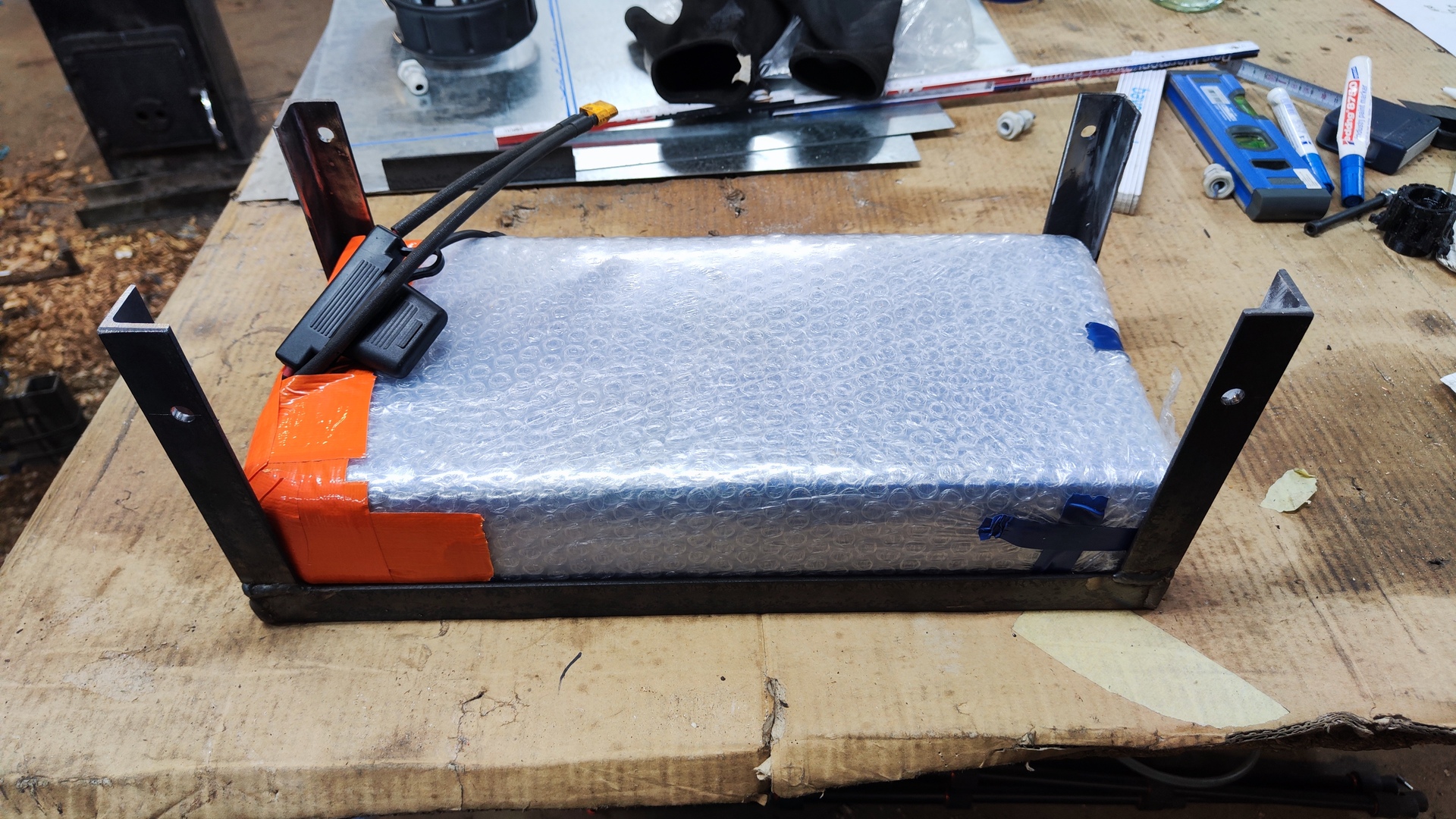
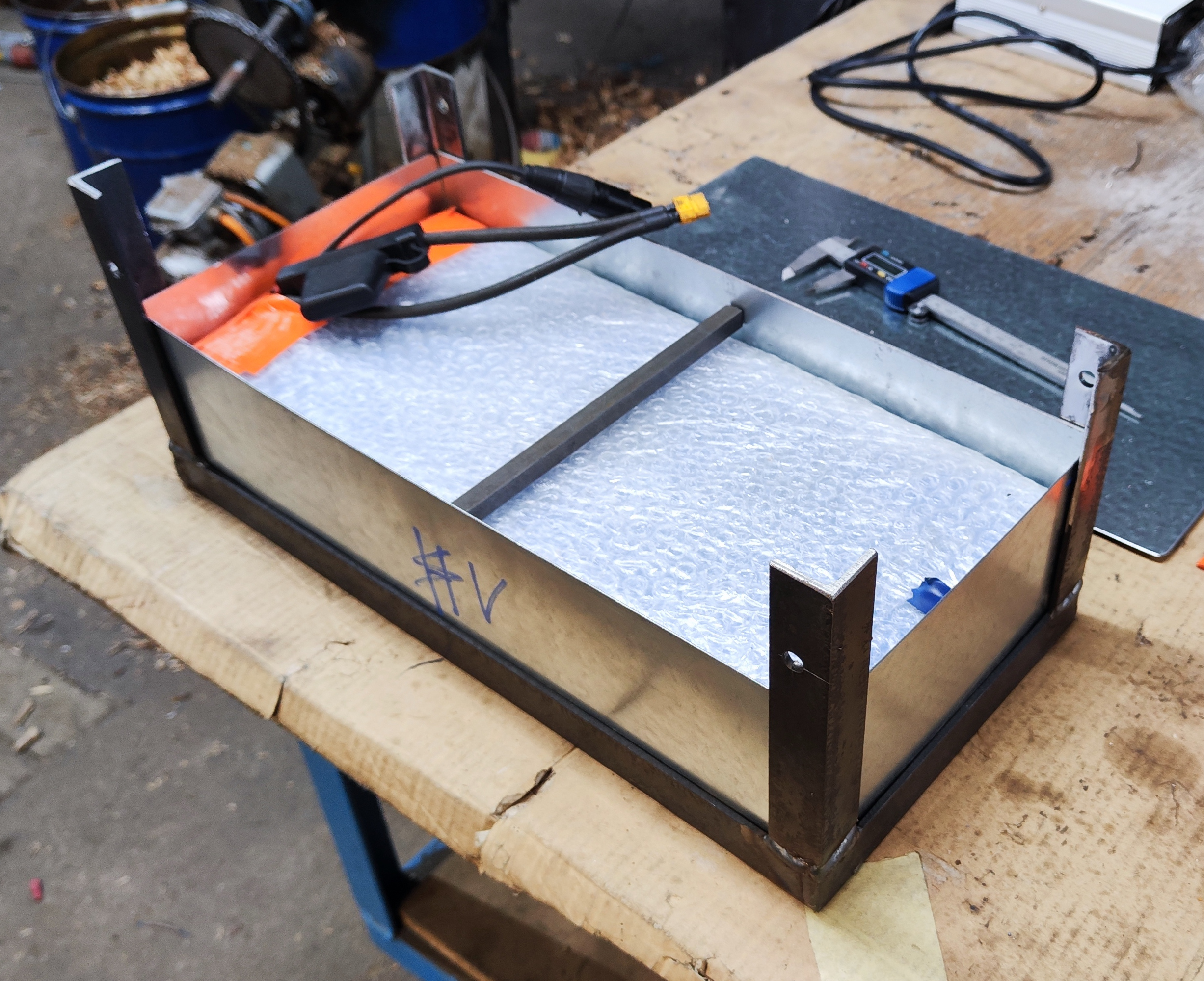 Test fit: battery pack padded with bubble wrap inside the custom enclosure.
Test fit: battery pack padded with bubble wrap inside the custom enclosure.
 Enclosure sealed with silicone for protection against dirt and water
Enclosure sealed with silicone for protection against dirt and water
Technical Notes & Assets
Drivetrain calculation
To design the custom drivetrain, I prepared a spreadsheet to size belts, pulleys, and gears correctly and to estimate the achievable speed of the vehicle.
This provides a quick overview of the drivetrain concept and expected performance.
The sheet also helps to keep track of different gear ratios and configurations that were tested during the design process.

Parts List & Prices
A complete parts list - including prices, total costs, and purchase links - was also created for this project.

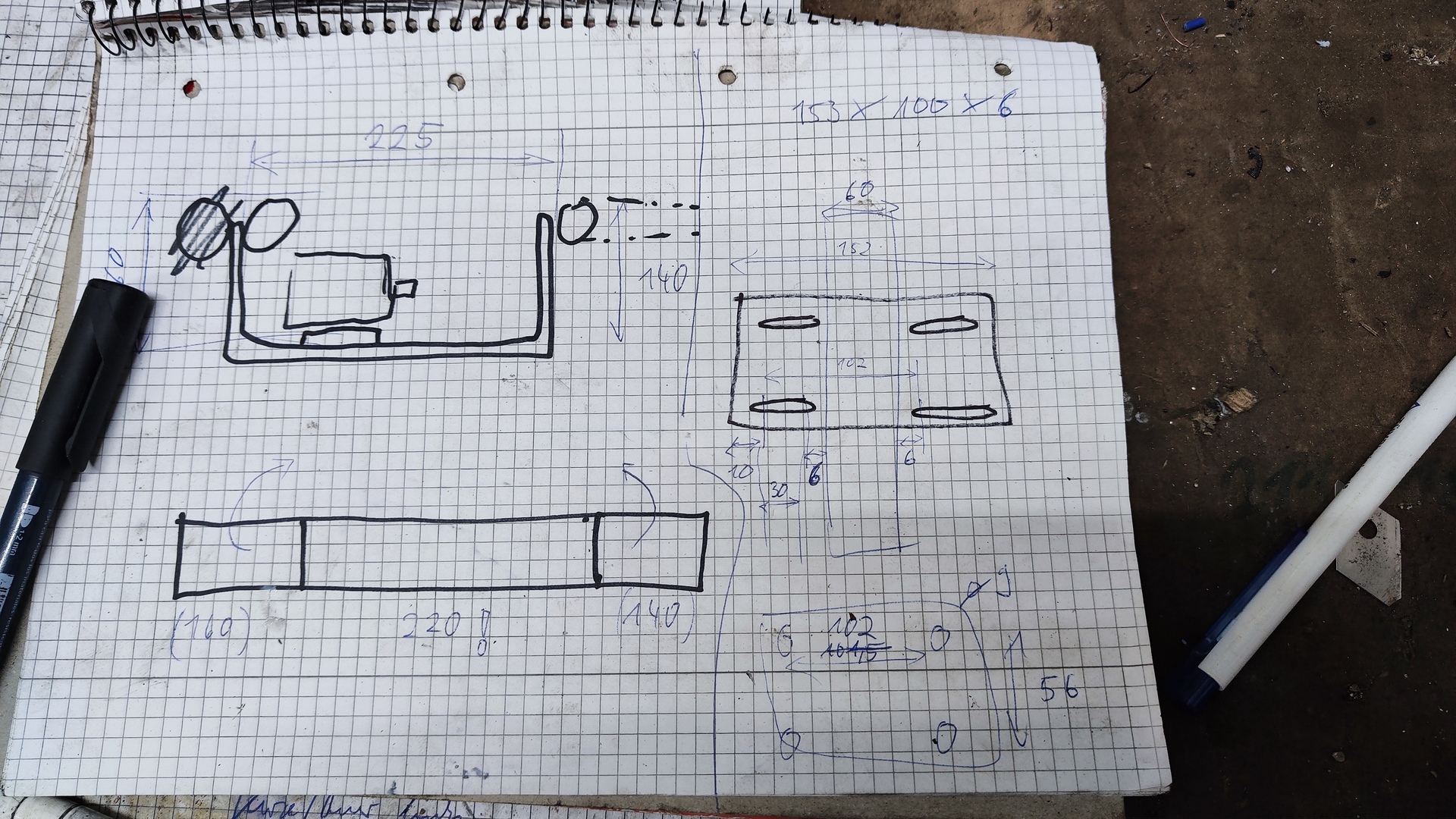
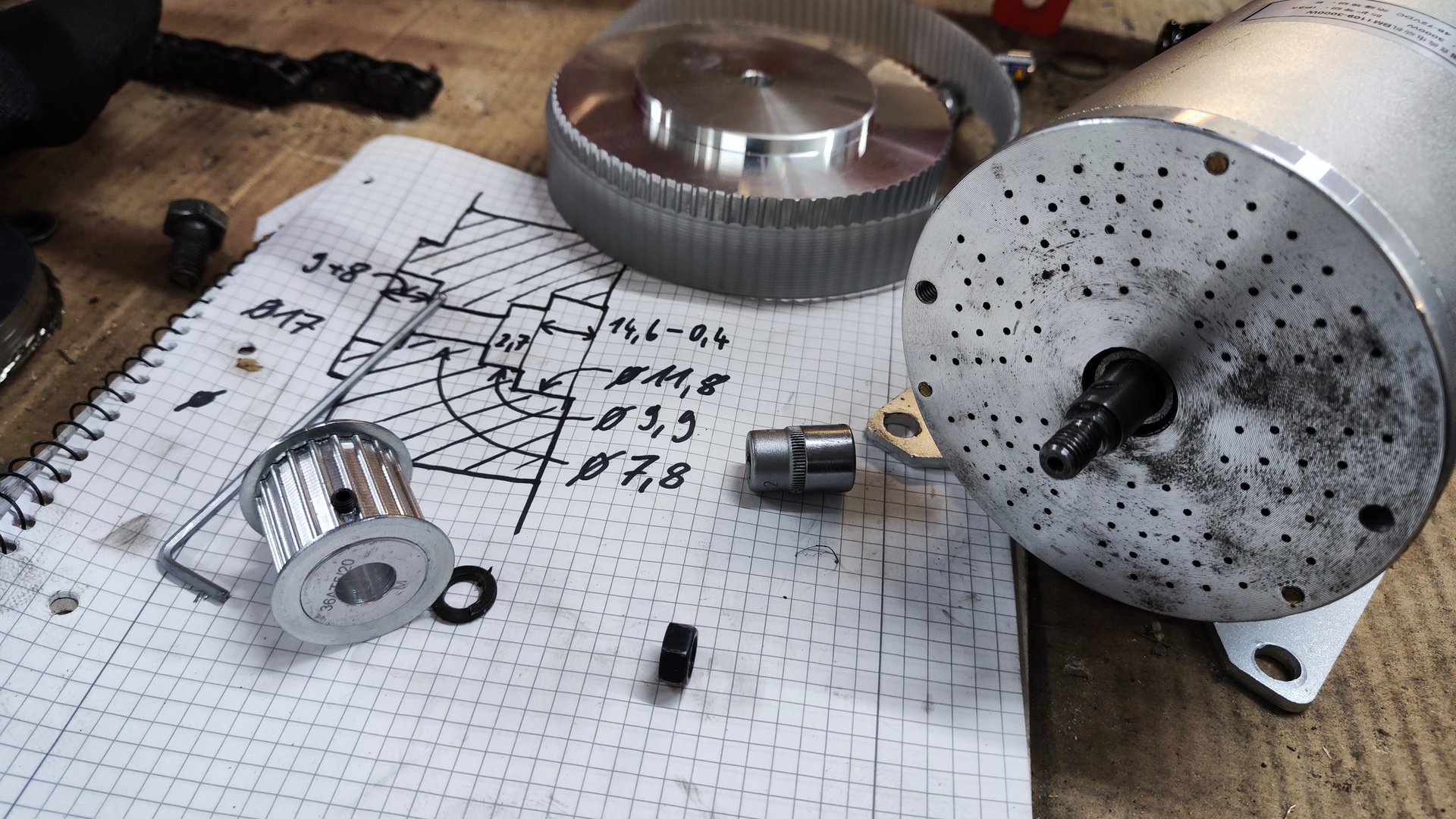
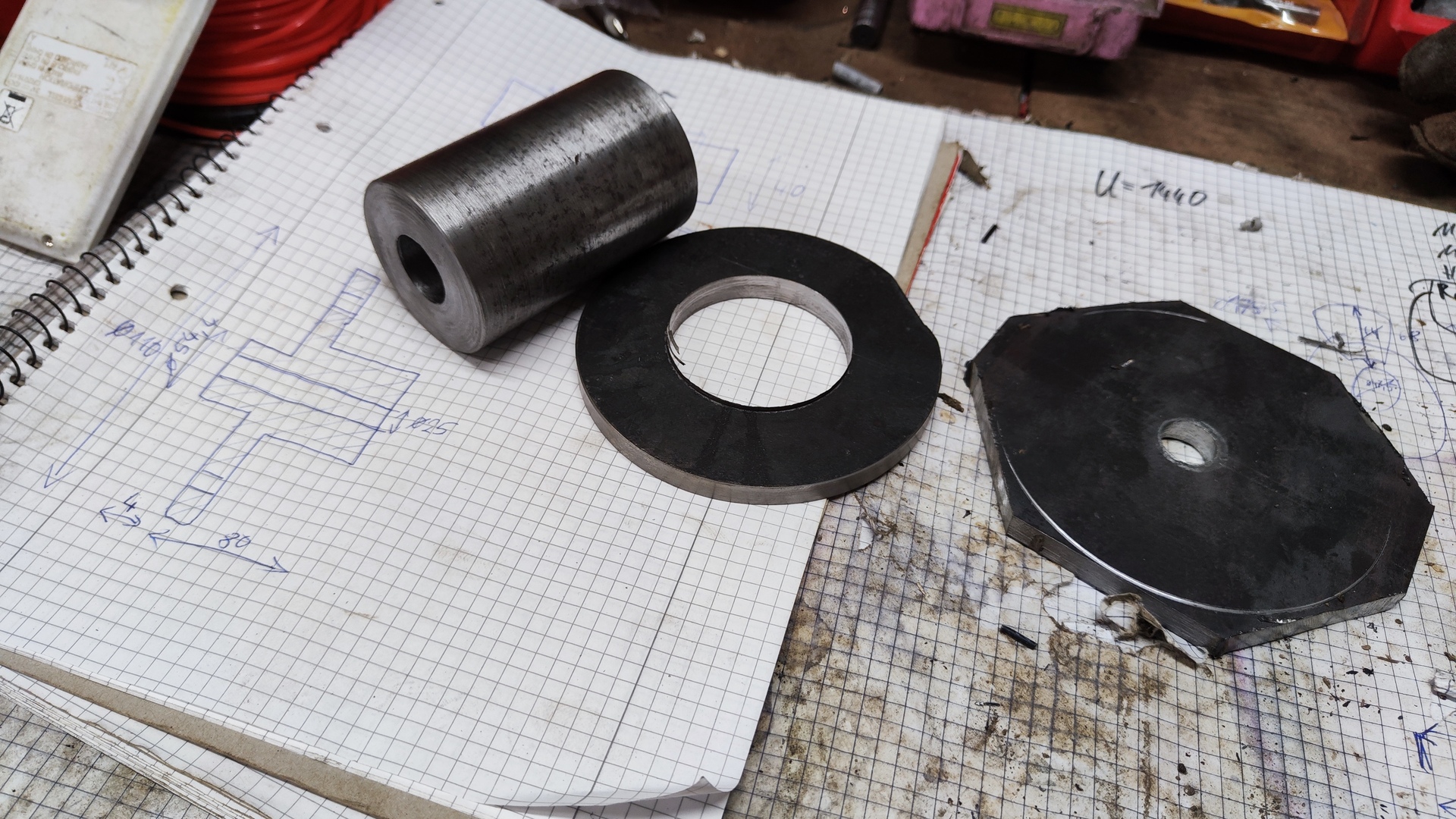
Technical Drawings
While most parts were built from simple sketches, a few were designed in CAD to make dimensioning easier. Some are included here for reference and documentation:
 Right rear wheel hub designed with bearings to spin freely on the axle (enables turning without differential)
Right rear wheel hub designed with bearings to spin freely on the axle (enables turning without differential)
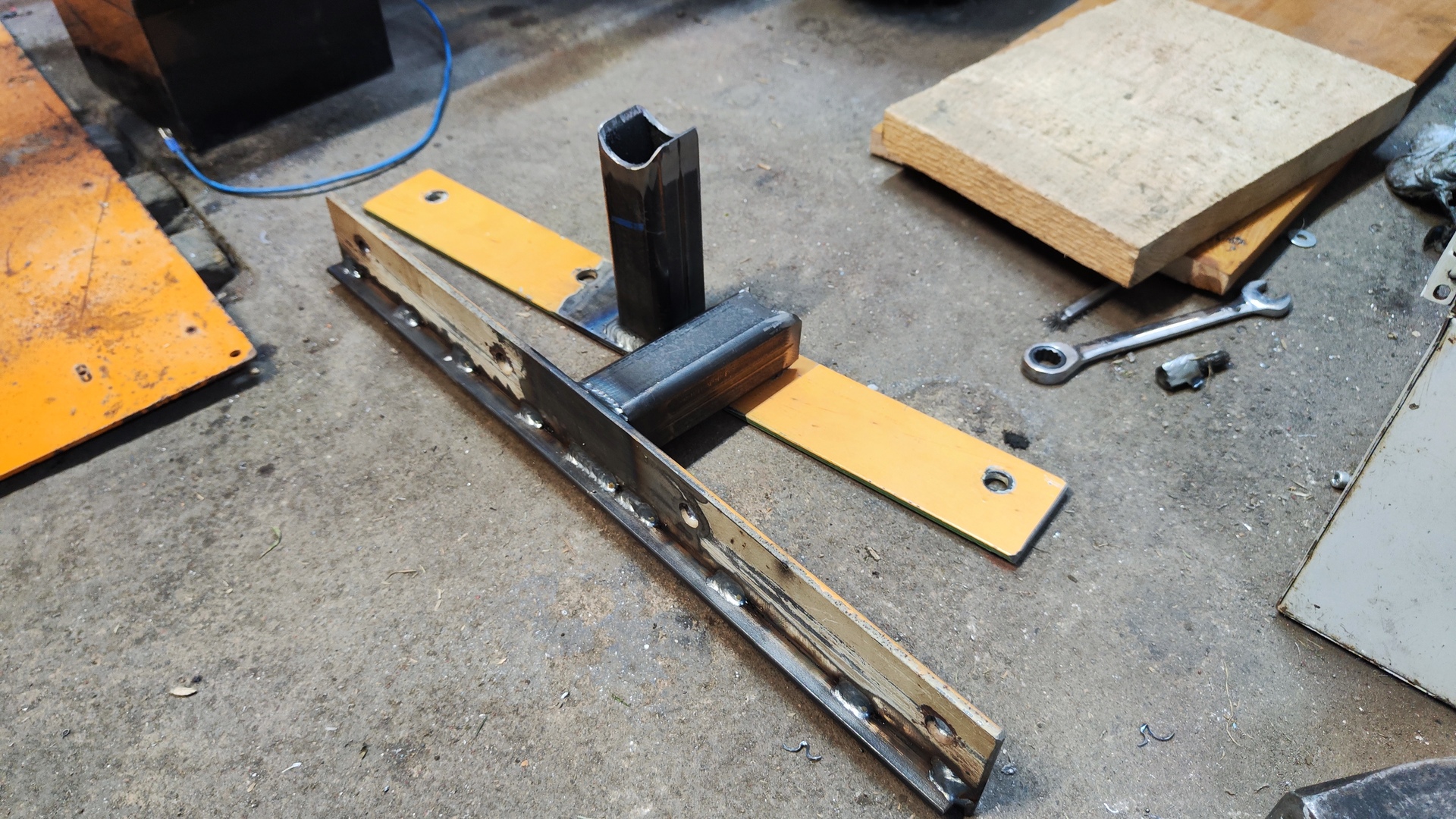
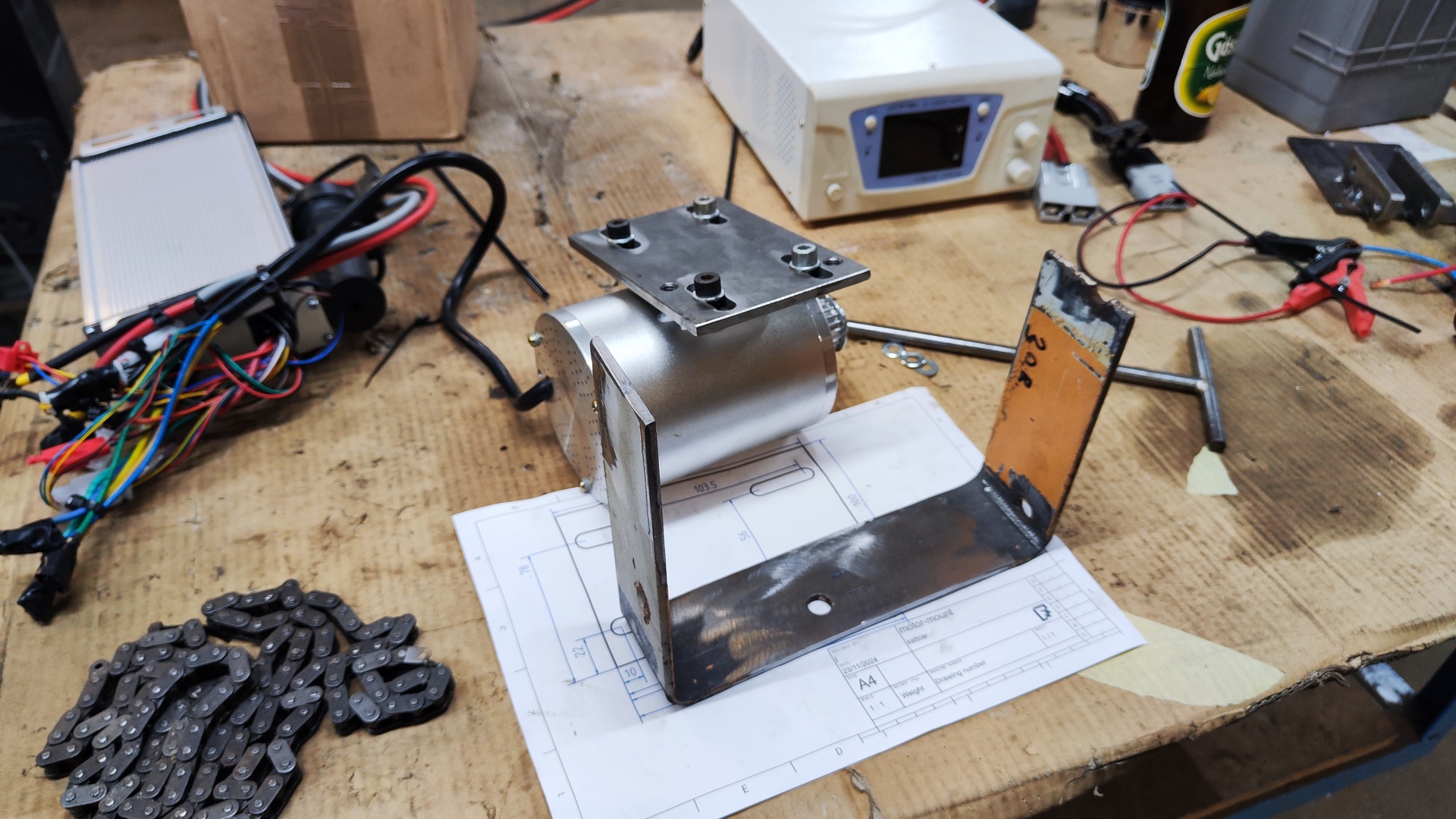
 Motor mounting plate with coordinate dimensions for easier milling
Motor mounting plate with coordinate dimensions for easier milling
All Drawings: kettcar_technical-drawings.pdf
Custom Control Board
The cheap 3000 W BLDC controller used here had the same problem as in my Electric Lawn Tractor, where it was previously installed:
Only a tiny range of the pedal was effective, making acceleration jerky and hard to control.
To fix this, I designed a custom throttle adapter PCB that rescales the pedal signal, adds smooth ramp-up, and allows multiple configurable speed modes.
For the Kettcar build I simply reused this board - it completely solves the throttle issue and it was even extended with features specific to this project.
- Purpose: Smoother throttle response, fully customizable speed modes
- MCU: ATmega8
-
Features:
- 3 speed levels + hidden sport mode
- Throttle remap (uses full pedal range)
- Ramp-up (smooth acceleration, prevents stuttering)
- Reverse + Headlight control
- Buzzer alerts
- Battery voltage indicator
- More details & Firmware: GitHub - throttle-tune
 Control PCB in housing
Control PCB in housing
Schematic of the control PCB:

3D Model of the designed pcb:
For more details about this PCB, visit the repository containing the PCB files and the firmware: GitHub - throttle-tune.
Pedal Assist Version
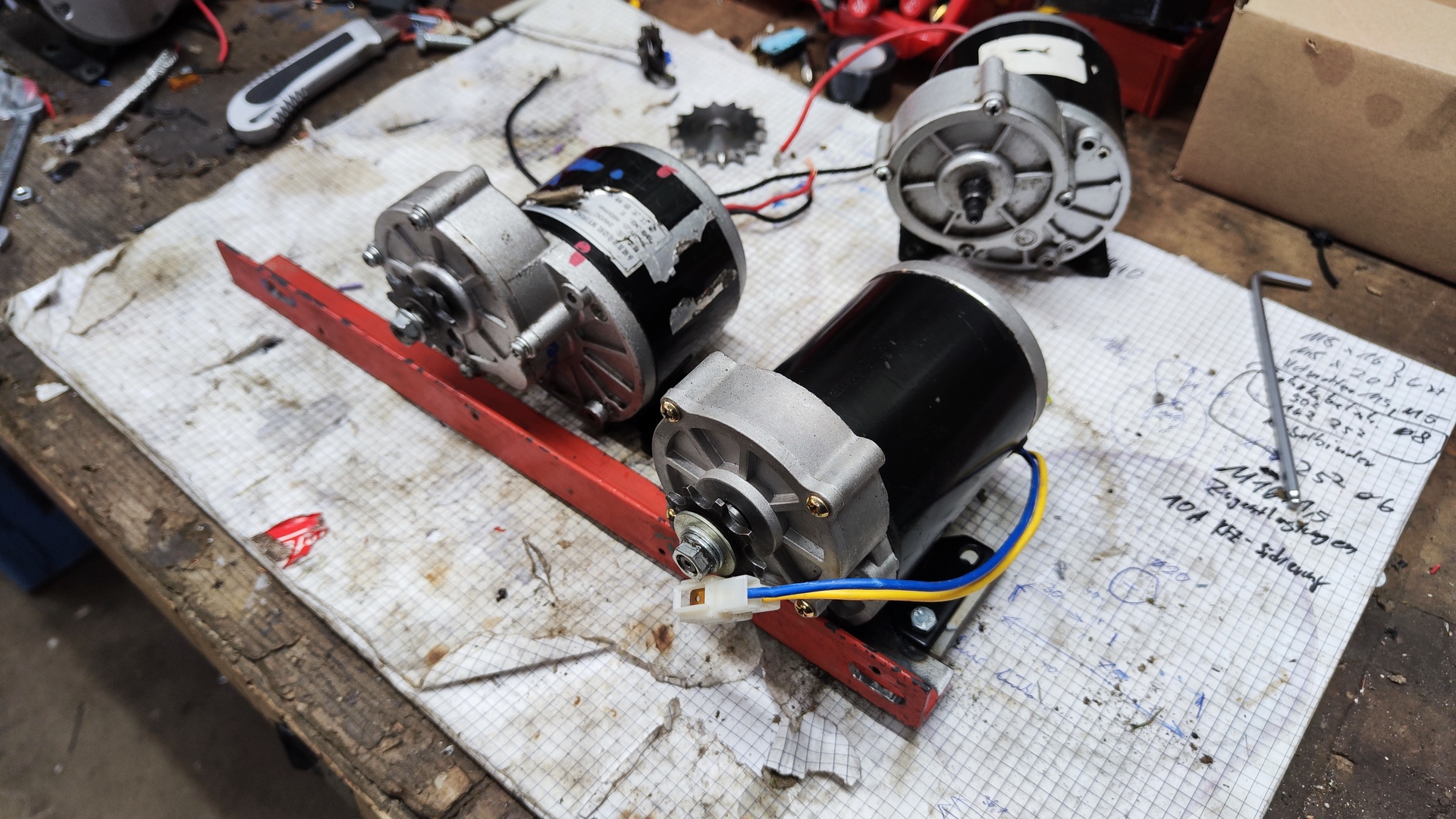
The very first idea was to add a simple motor for extra pedaling support with minimal effort, using a 24 V, 300 W brushed DC motor on the original chain drive.
While it worked, it was underpowered, overheated, dangerous, and ultimately impractical. It turned out no one actually wanted to pedal anymore at all anyways. This led to the switch to a full-electric 3000 W system, discarding the pedals completely.
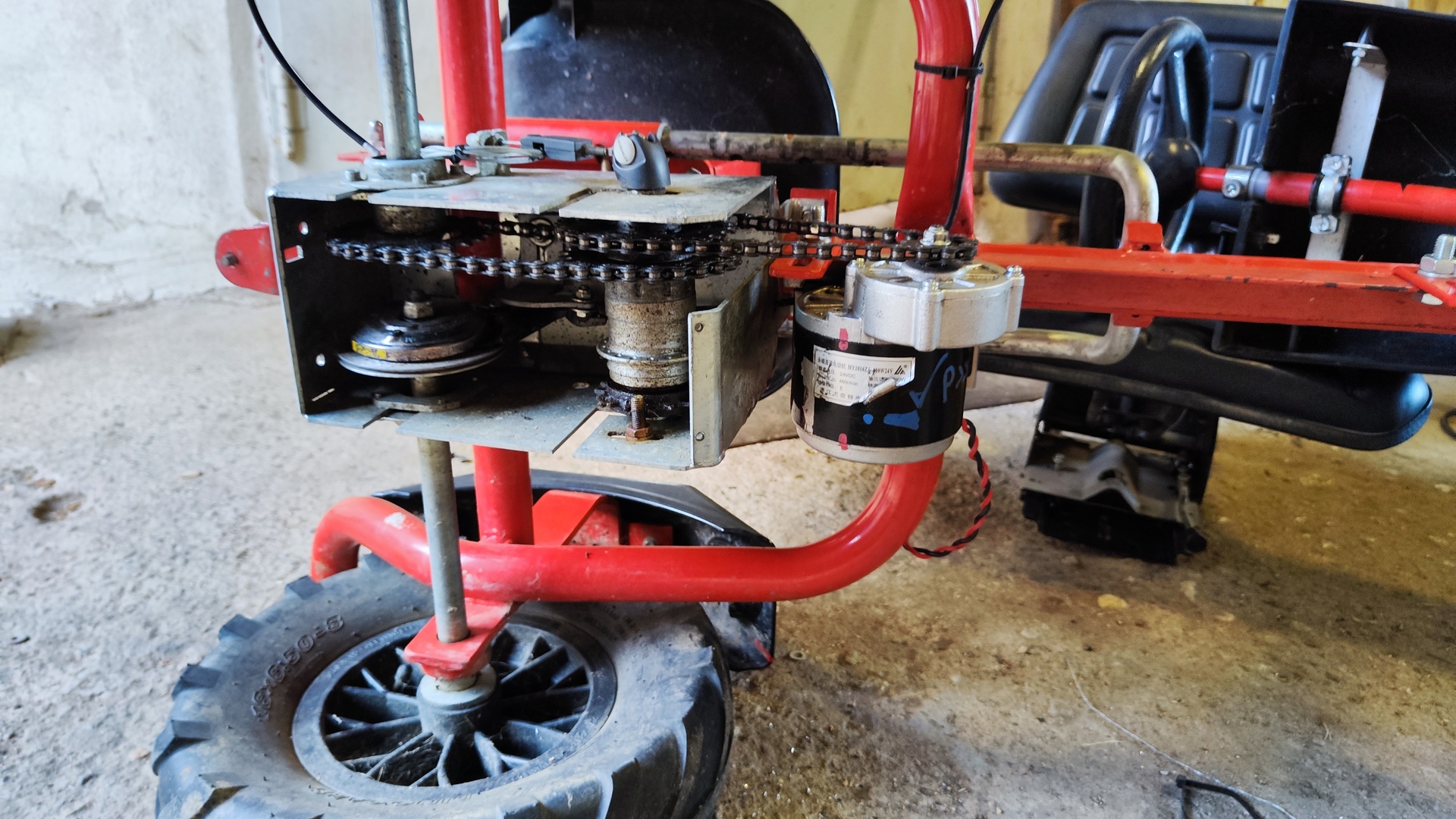
 Original drivetrain with pedals and 3-speed bike hub gearbox, plus added 24 V DC motor for pedal support (Try 1: pedals + motor in parallel).
Original drivetrain with pedals and 3-speed bike hub gearbox, plus added 24 V DC motor for pedal support (Try 1: pedals + motor in parallel).
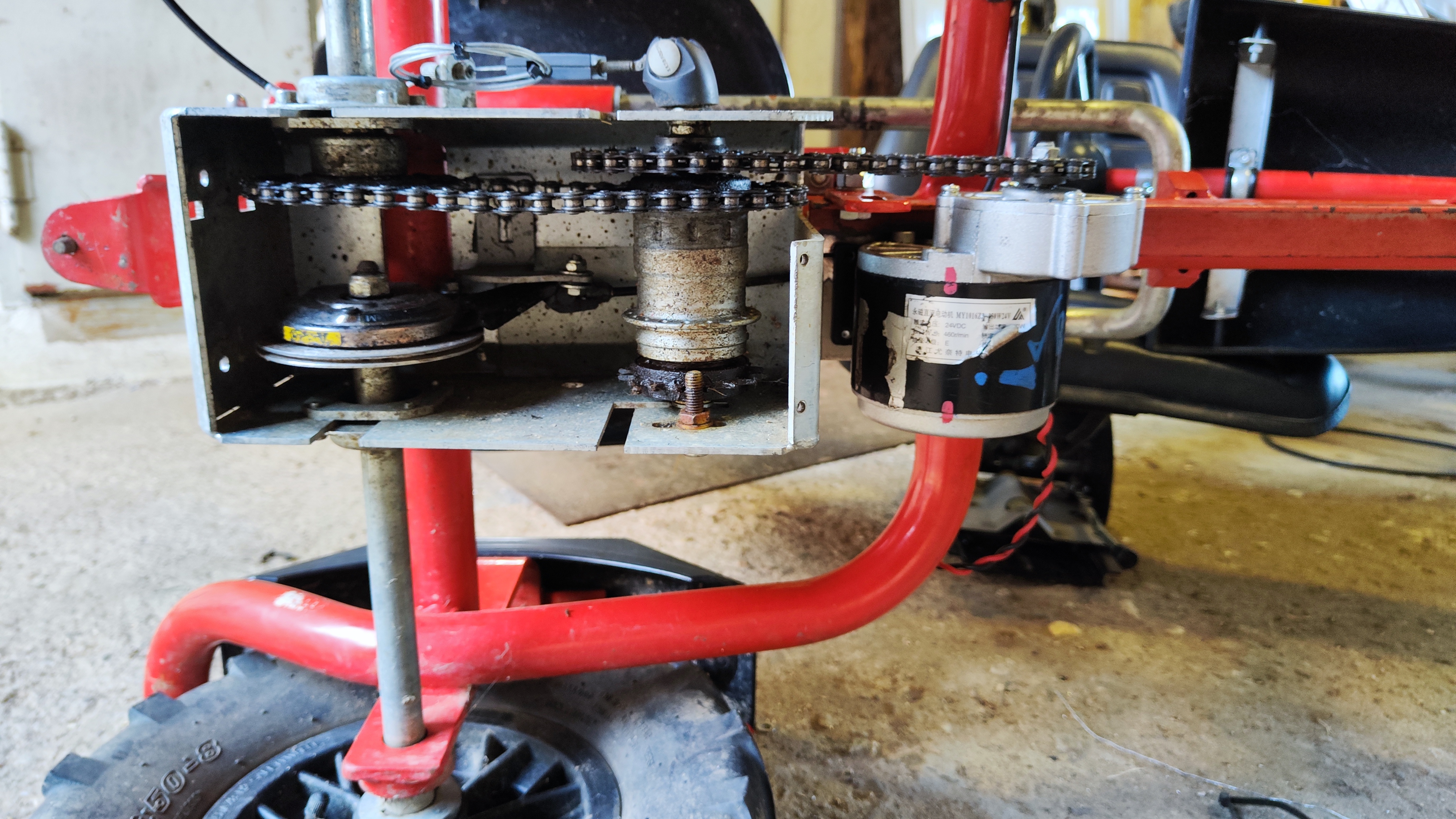 Close-up of the 3-speed bike hub gearbox with pedals removed and only the 24 V DC motor driving the chain (Try 2: motor only, no pedals - too weak to drive permanently).
Close-up of the 3-speed bike hub gearbox with pedals removed and only the 24 V DC motor driving the chain (Try 2: motor only, no pedals - too weak to drive permanently).
Videos
Build Process
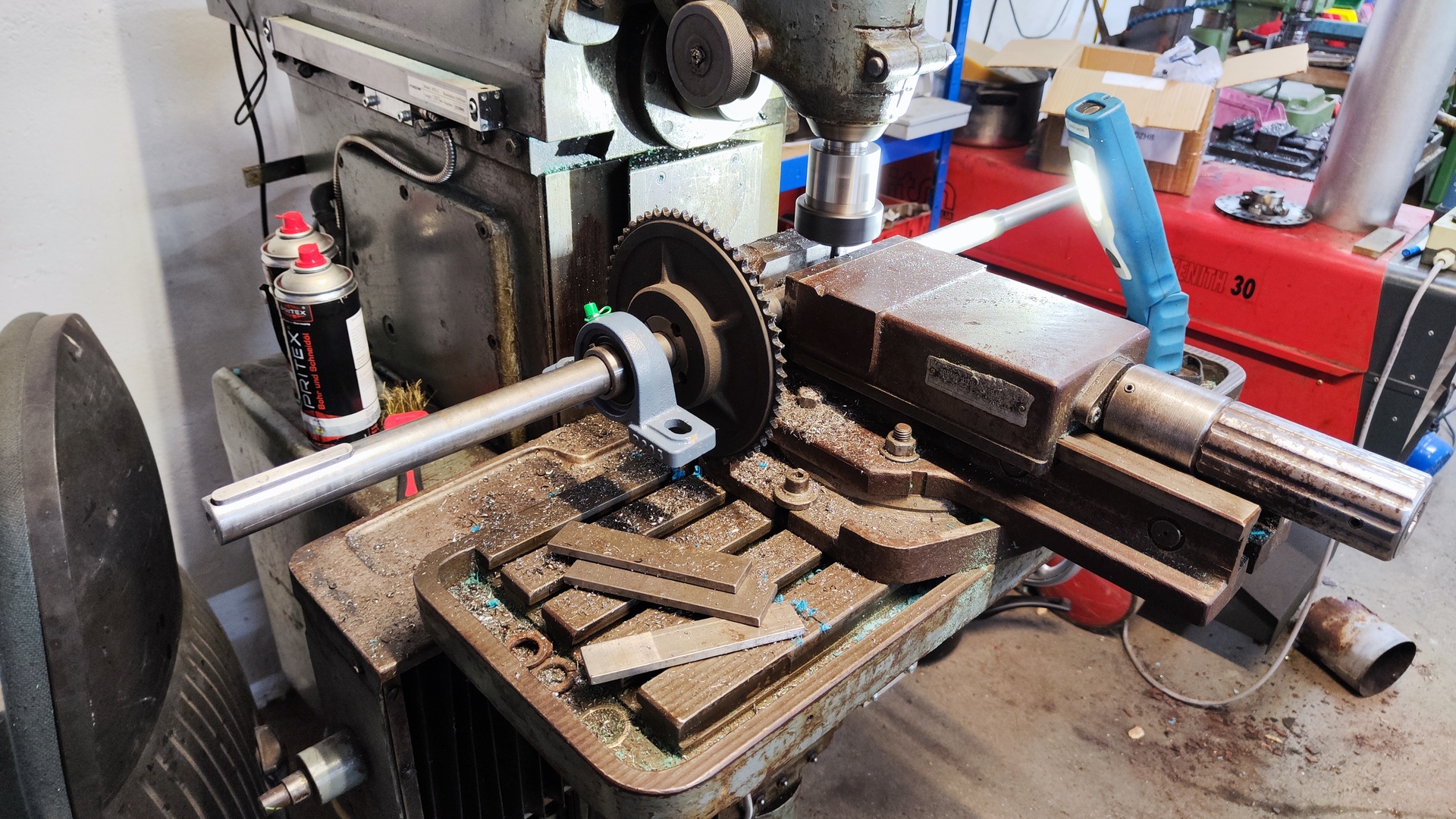
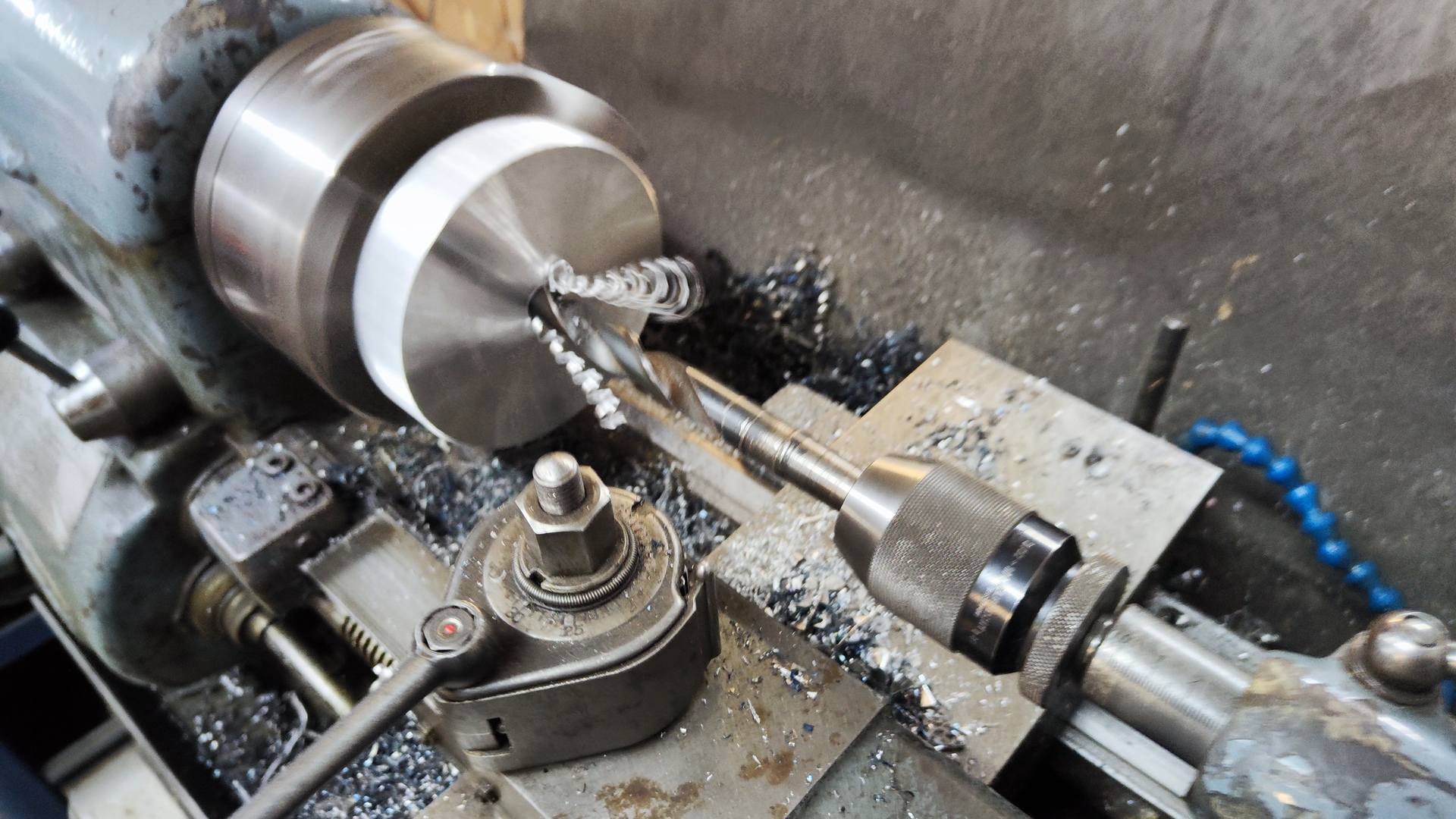
Key cutting
Drivetrain test
Drives
First test drive
Drive in mud
Final version
Gallery